

INS/GNSS/polarization/geomagnetism combined navigation alignment method based on Kalman filtering
A technology of Kalman filtering and integrated navigation, which is used in navigation, navigation, mapping and navigation through velocity/acceleration measurement, which can solve the problems of poor system signal synchronization, large error, and long alignment time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0095] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
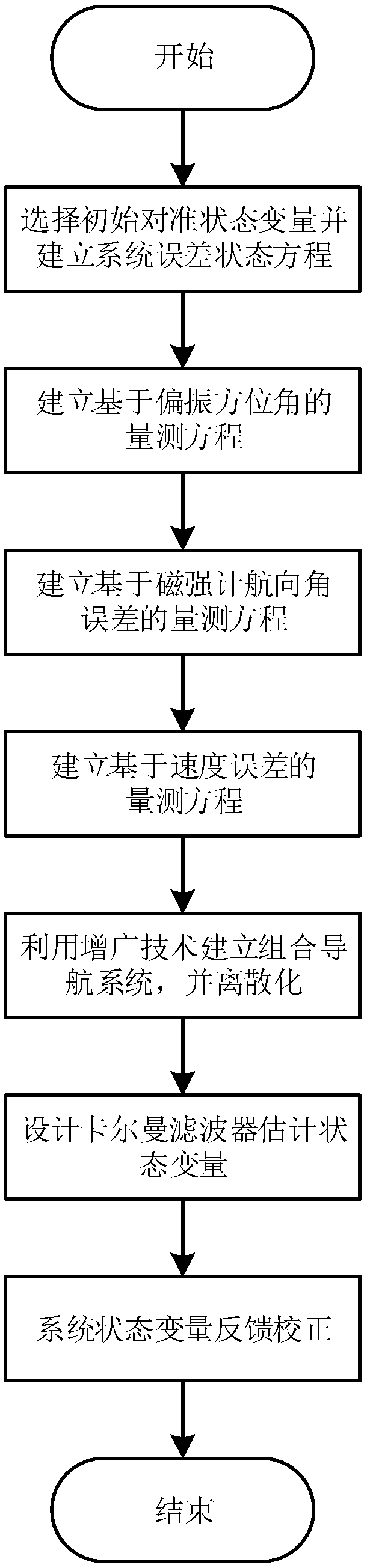
[0096] Such as figure 1 Shown, the specific implementation steps of the present invention are as follows:
[0097] The first step is to select the misalignment angle, velocity error, position error, gyroscope zero bias, accelerometer zero bias and magnetic heading angle error as the state variables of the INS / GNSS / polarization / geomagnetic integrated navigation system, and establish the initial alignment state equation.
[0098] The established equation of state for the initial alignment is:
[0099]
[0100] Among them, F is the system state transition matrix, specifically expressed as:
[0101]
[0102] Among them, A is the state transition matrix of the initial alignment of the standard 15-dimensional strapdown inertial navigation system, and β is the anti-correlation time coefficient.
[0103] X is the state variable of the INS / GNSS / polar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More