

Decision planning method for automatic driving of special vehicle
A technology for automatic driving and working vehicles, applied in the direction of motor vehicles, vehicle position/route/height control, non-electric variable control, etc., can solve the problems of environmental map uncertainty, reduce the operating efficiency of special operation vehicles, etc., and achieve rapid growth The possibility of returning to the task reference path, improving the efficiency of special operations, and the effect of improving operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
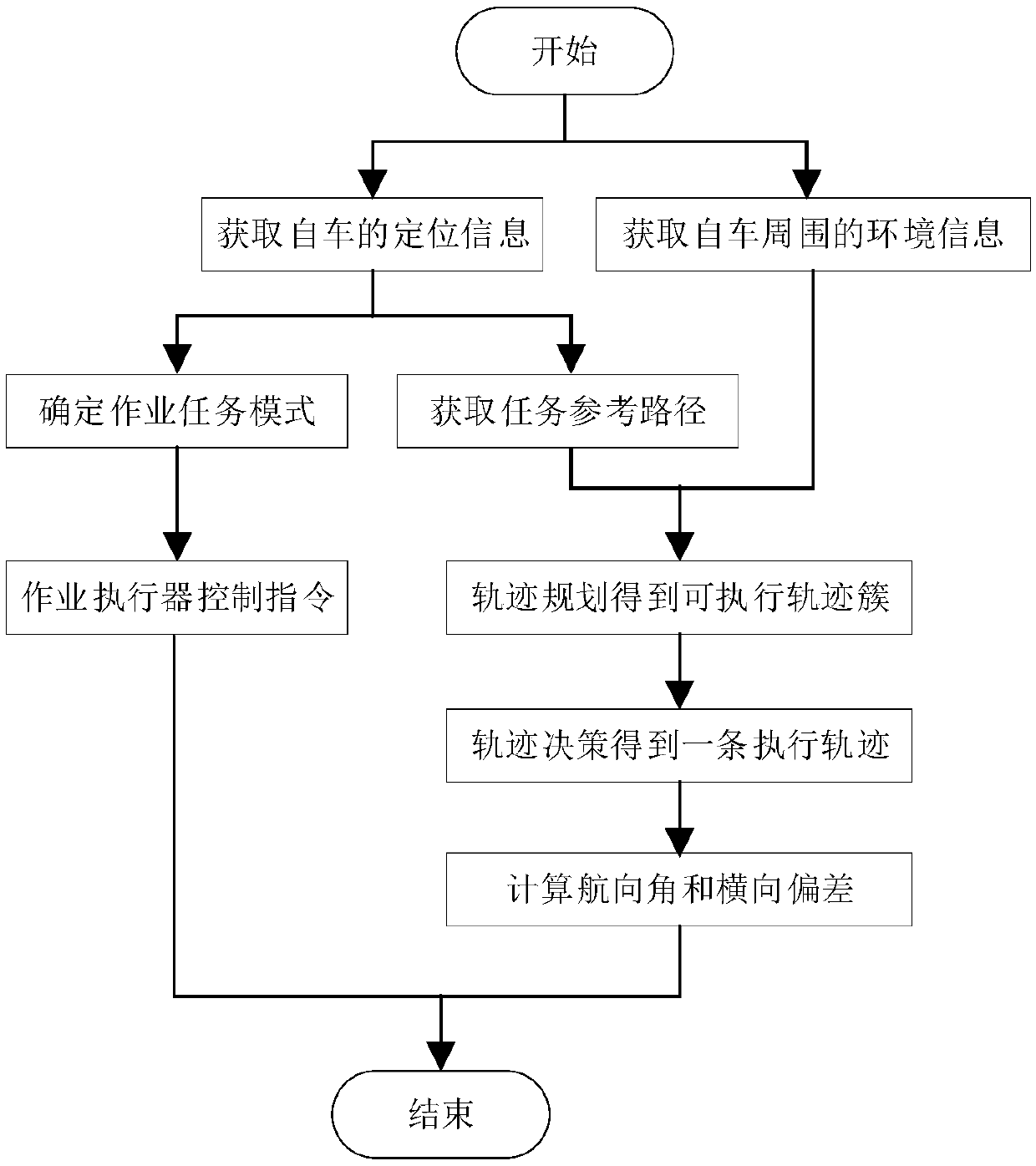
[0052] Such as figure 1 As shown, the present invention provides a decision-making planning method for an automatic driving special operation vehicle, and the specific steps include:
[0053] Step 1: The driver controls to the vicinity of the automatic driving operation area, starts the automatic driving operation mode, and the automatic driving operation module takes over the control of the whole vehicle, including operation control and driving control;
[0054] Step 2: The automatic driving operation module determines the current pose of the vehicle through GPS / IMU, mainly including longitude, latitude, heading and current positioning status;
[0055] Step 3: Taking the self-vehicle as the center, project the environmental information sent by the perception system into a grid map. The grid without obstacles is uniformly marked as 0; for the grid with obstacles, it can be marked as Static or dynamic; for the type of obstacle, it can also be marked as cement roadside, shrub, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More