

Method and system for real-time positioning and map construction of ellipsoid boundary Kalman filter
A technology of Kalman filtering and map construction, which is used in geographic information databases, structured data retrieval, navigation calculation tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
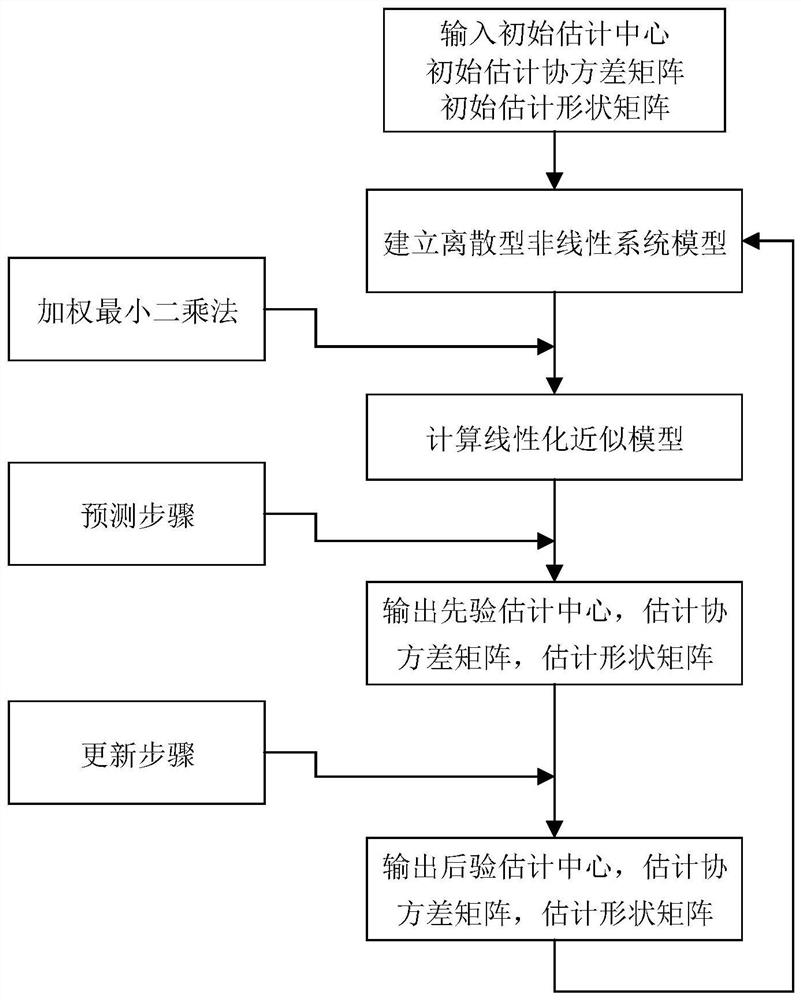
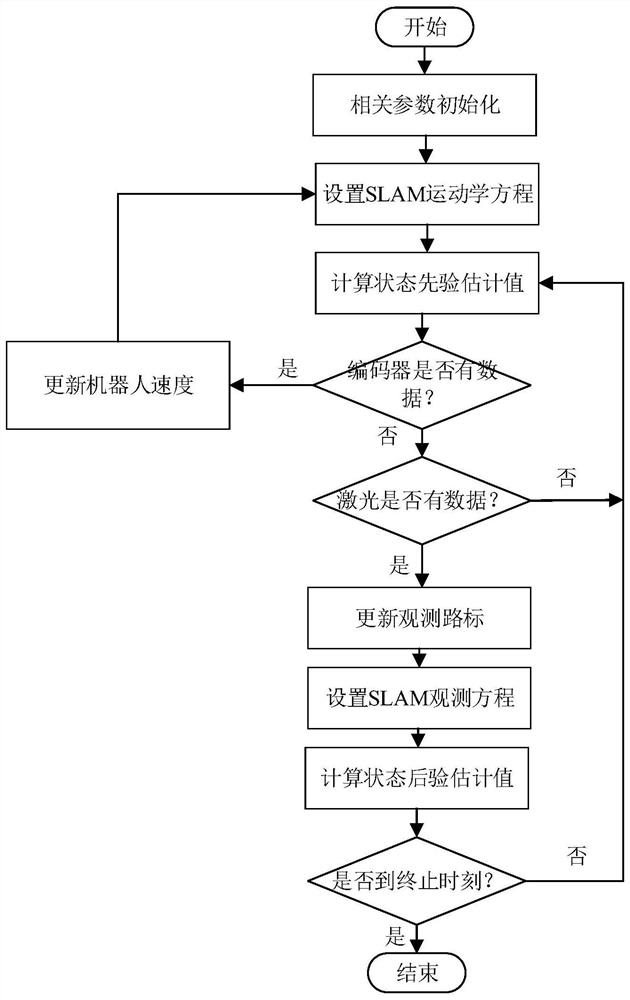
[0110] figure 2 The specific program flow chart of the real-time positioning and mapping of mobile robots based on the ellipsoid boundary Kalman filter algorithm is given.
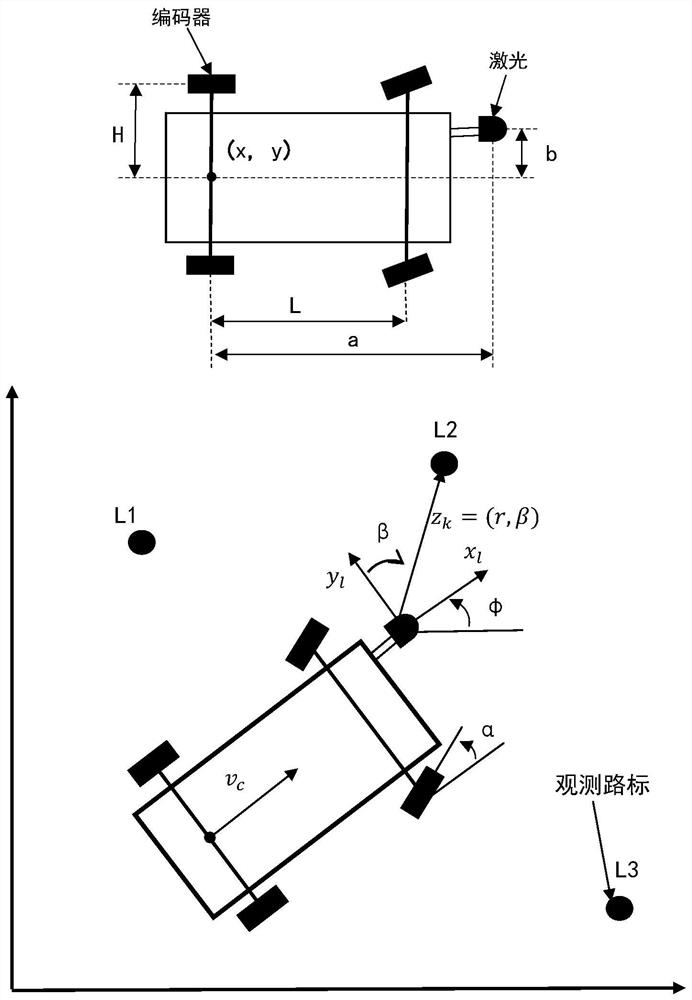
[0111] Consider the SLAM problem of mobile robot planar motion, refer to image 3 , the kinematic equation can be given in the Cartesian coordinate system:
[0112]
[0113] Here the SLAM system state vector is x k =[x(k) y(k) φ(k)] T , which represents the position and orientation of the robot, and the noise vector is Gaussian noise, is unknown but bounded noise.
[0114] The speed of the robot v c It is measured by the encoder on the rear wheel, that is, v e is the rear wheel speed calculated by the encoder, L is the distance between the front and rear axles, h is the distance between the center of the rear axle and the encoder, b is the vertical distance from the center of the rear axle to the laser sensor, a is the center of the rear axle to the laser sensor horizontal distance.
[011...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More