

Underwater glider with memory-alloy driving attitude control
An underwater glider and memory alloy technology, which is applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems that underwater glider does not have the ability to turn, the danger of electrical circuit short circuit, and takes up a lot of space. Good performance, saving space and load, and reducing response time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
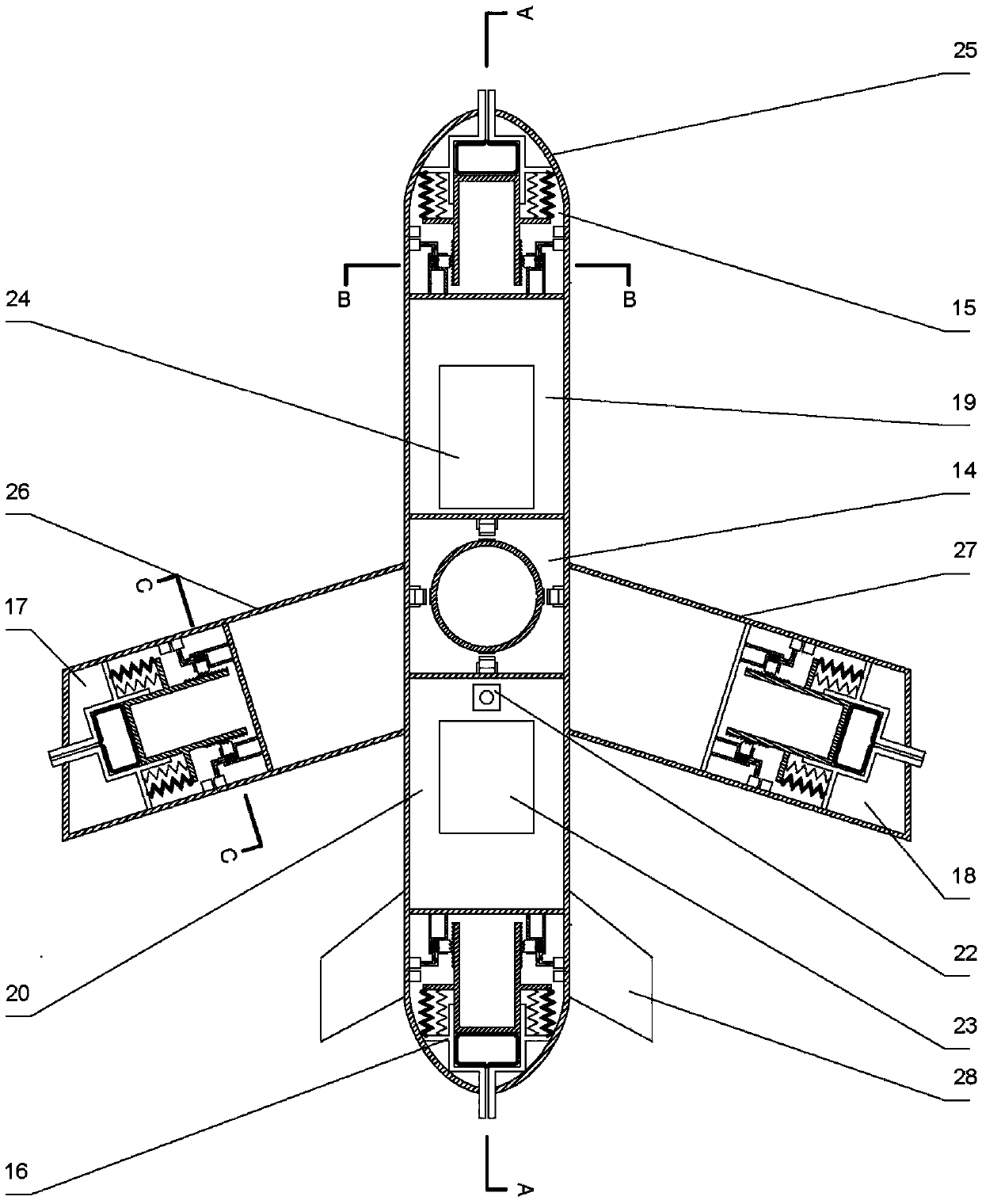
[0040] Such as image 3 and Figure 4As shown, the underwater glider comprises a fuselage 25, a left hang glider 26, a right hang glider 27 and an empennage 28; Empennage 28; Fuselage 25 bow interior is provided with bow buoyancy chamber 15, fuselage 25 middle interior is provided with central buoyancy chamber 14, fuselage 25 stern interior is provided with stern buoyancy chamber 16, and left hang glider 26 outer side interior A left wing buoyancy chamber 17 is provided, and a right wing buoyancy chamber 18 is arranged inside the outer part of the right hang glider 27; the inside of the fuselage 25 between the bow buoyancy chamber 15 and the central buoyancy chamber 14 forms a front control cabin 19, a central buoyancy chamber 14 and a stern buoyancy chamber. The inside of the fuselage 25 between the buoyancy chambers 16 forms the rear con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More