

Steer-by-wire double-motor system based on driver behavior identification and yaw stability compensation strategy thereof
A steering-by-wire and driver technology, applied to steering mechanisms, electric steering mechanisms, power steering mechanisms, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
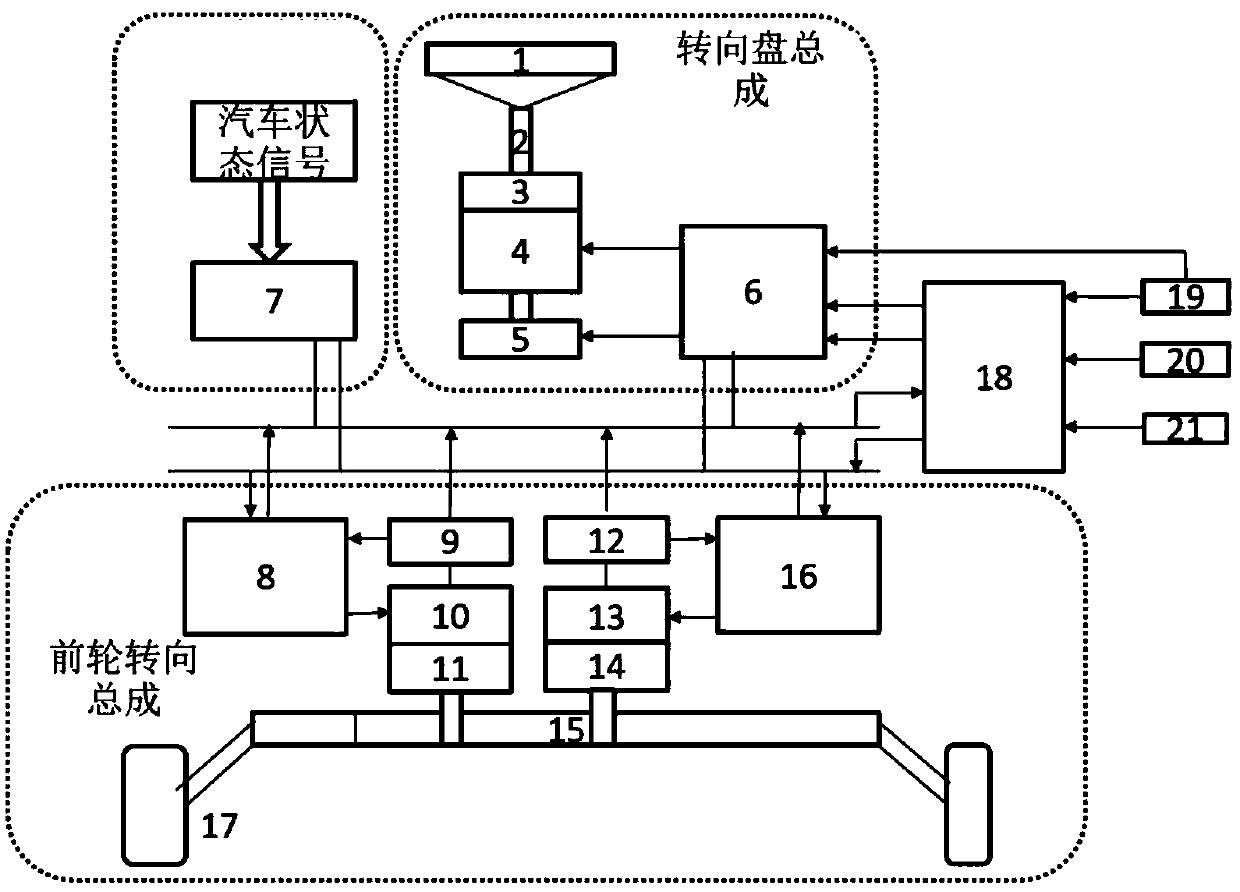
[0109] refer to figure 1 The schematic diagram of the structure and layout of the double-actuator-motor system for steering-by-wire in the patent of the present invention is shown, which mainly includes: a collection unit, a central controller, a steering wheel assembly, and a front wheel steering assembly;
[0110] The acquisition unit includes: a steering wheel angle sensor 4, a steering wheel torque sensor 5, a front wheel angle sensor 9, a front wheel torque sensor 12, a vehicle speed sensor 19, a lateral acceleration sensor 20 and a yaw rate sensor 21;
[0111] The central controller (ECU) includes an arithmetic controller 7, a robust control and compensation unit 18; the robust control and compensation unit 18 includes a robust control unit and a compensation control strategy unit;
[0112] The steering wheel assembly includes a steering wheel 1, a steering column 2, a road sense motor 3, and a road sense motor controller 6 connected in sequence;
[0113] The front whee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More