High-precision inertial navigation positioning algorithm based on motion state detection
A motion state and inertial navigation technology, applied in the field of positioning, can solve the problems of barometer increasing the cost of inertial navigation system, power consumption, drift, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
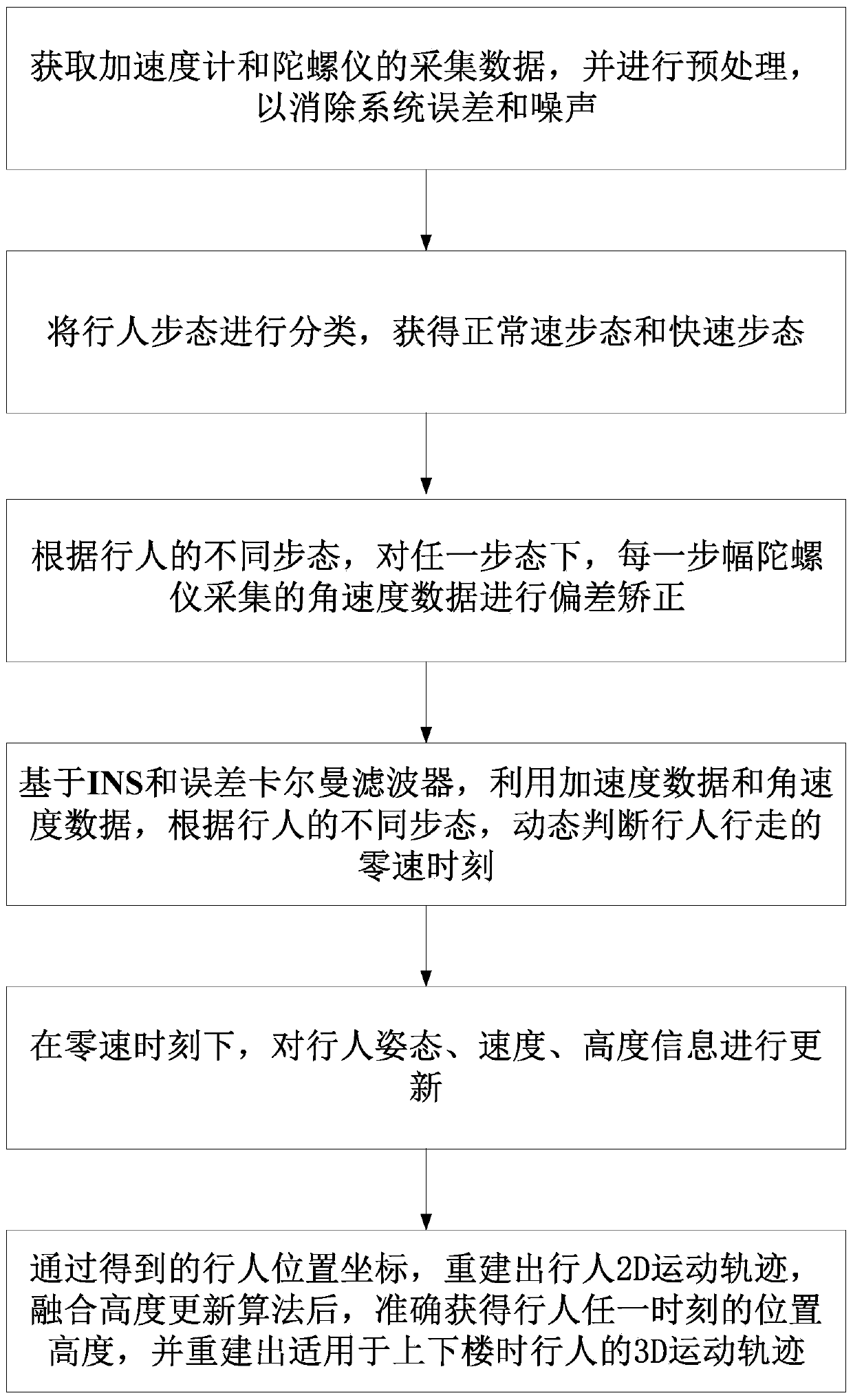
[0121] Such as figure 1 As shown, this embodiment provides a high-precision inertial navigation positioning algorithm based on motion state detection. The algorithm is only based on the data collected by the accelerometer and gyroscope for positioning. Specifically:
[0122] The first step is to obtain the collected data of the accelerometer and the gyroscope, and perform preprocessing to eliminate the systematic error of the accelerometer and the gyroscope and the noise generated by pedestrian friction; wherein, the collected data includes the acceleration data of the accelerometer and The angular velocity data of the gyroscope. In this embodiment, the preprocessing of acceleration data and angular velocity data includes the following steps:
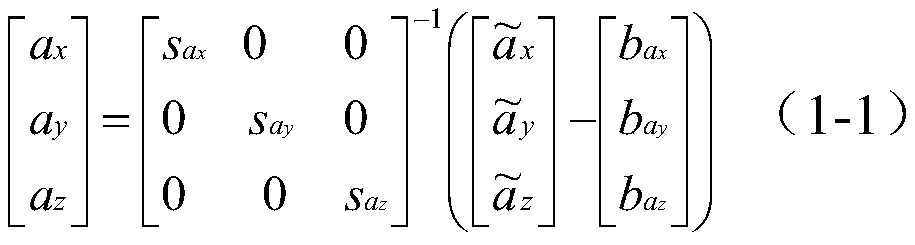
[0123] (11) Acceleration calibration: the expression of the calibrated three-axis acceleration is:
[0124]
[0125] Among them, a x 、a y 、a z are the calibrated acceleration values in the directions of x, y, and z axes respec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



