

Control system of electrically driven quadruped robot
A quadruped robot and control system technology, applied in the field of electric drive quadruped robot control, can solve problems such as general performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
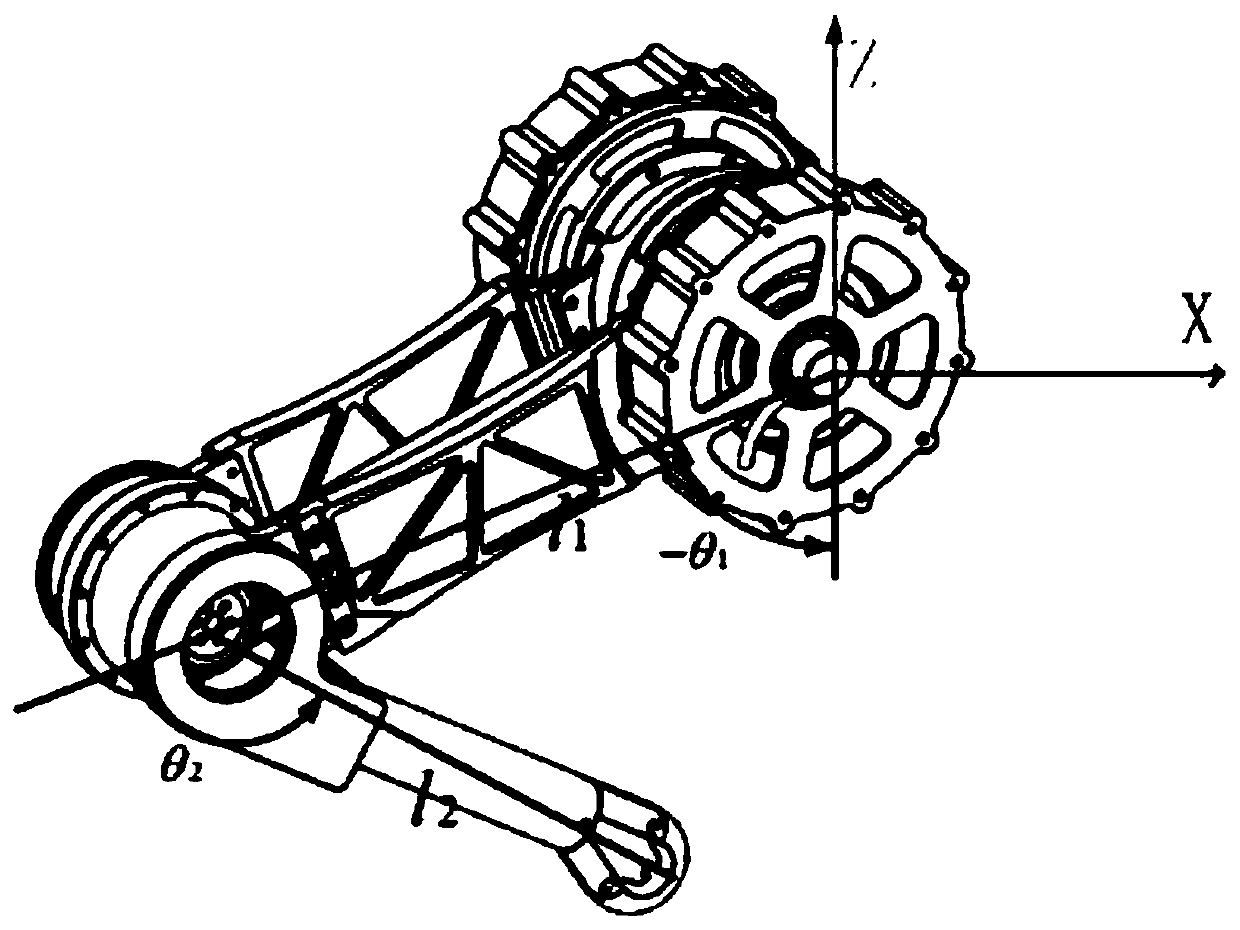
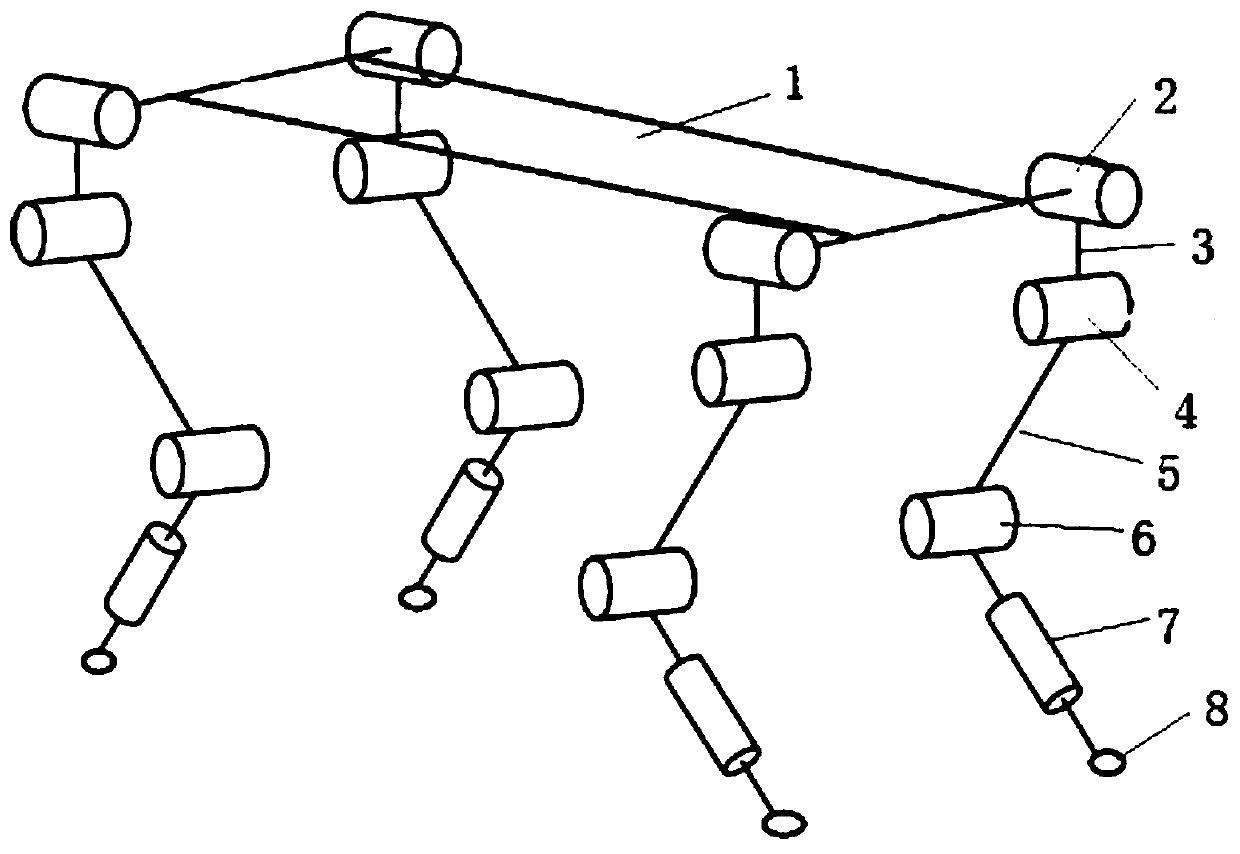
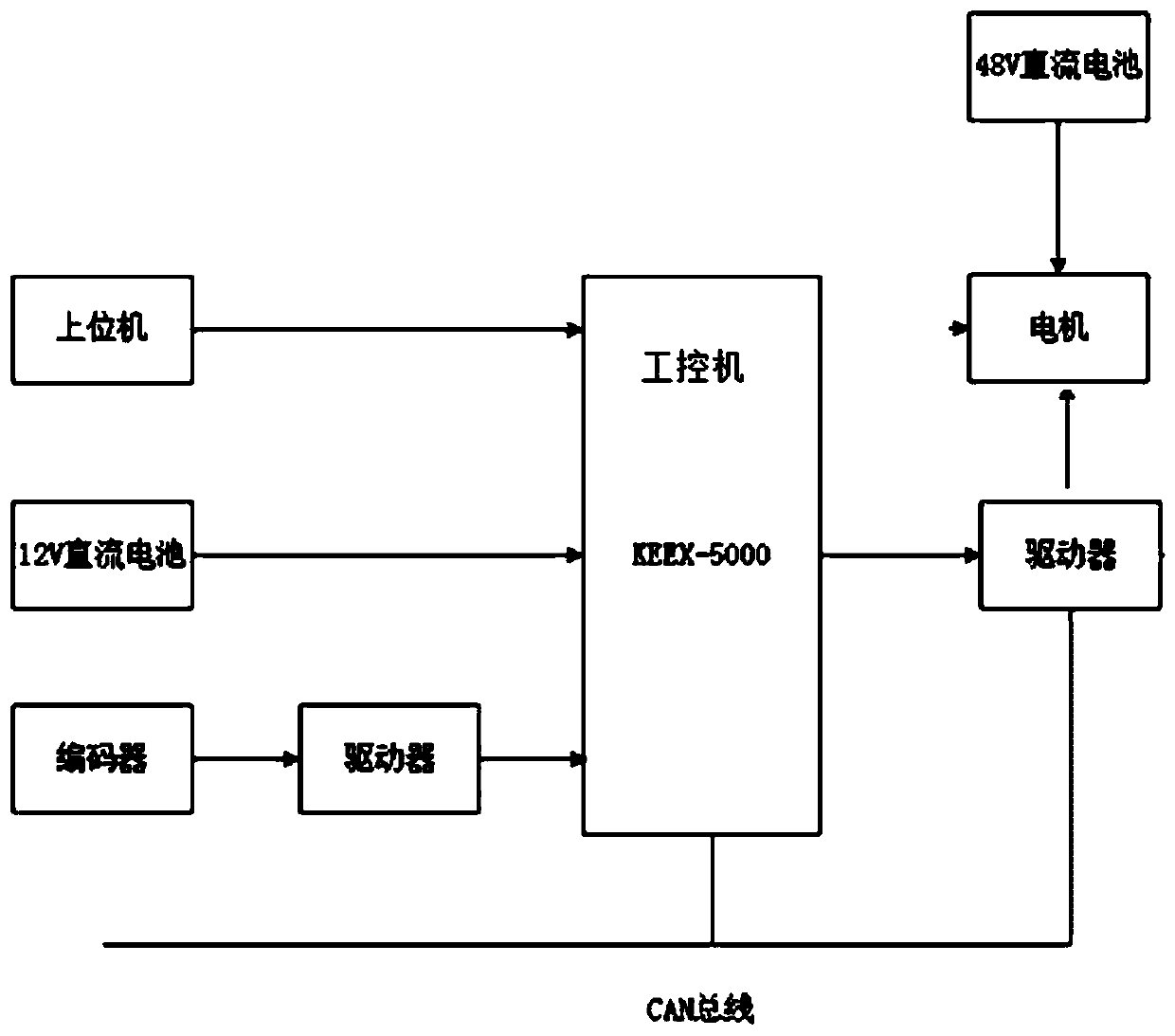
[0040] The control system for the electric drive quadruped robot of the present invention is aimed at figure 1 The two-degree-of-freedom single-leg structure shown, such as image 3 , The control system includes a host computer, an industrial computer, a driver and an encoder. The industrial computer and the host computer transmit data through the TCP / IP protocol. The industrial computer and the driver are connected through the CAN bus, and the encoder is connected to the driver through a dedicated signal line. The encoder is fixed at the motor output. The encoder is used to detect the rotation angle of the motor, the number of pulses measured by the encoder and the known figure 1 The reduction ratio De of the primary planetary reducer at the middle and calf joints can be obtained figure 1 The rotation angle of the thigh and calf joints of the leg-foot robot shown, the encoder uploads the pulse number to the driver, and the driver passes the filtered pulse value through image 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More