

Bridge bottom surface inspection route planning method
A bridge and bottom surface technology, applied in navigation, ground installations, surveying and navigation, etc., can solve the problems of poor data stability, low degree of automation, low security, etc., achieve high stability and safety, improve the degree of automation, improve The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
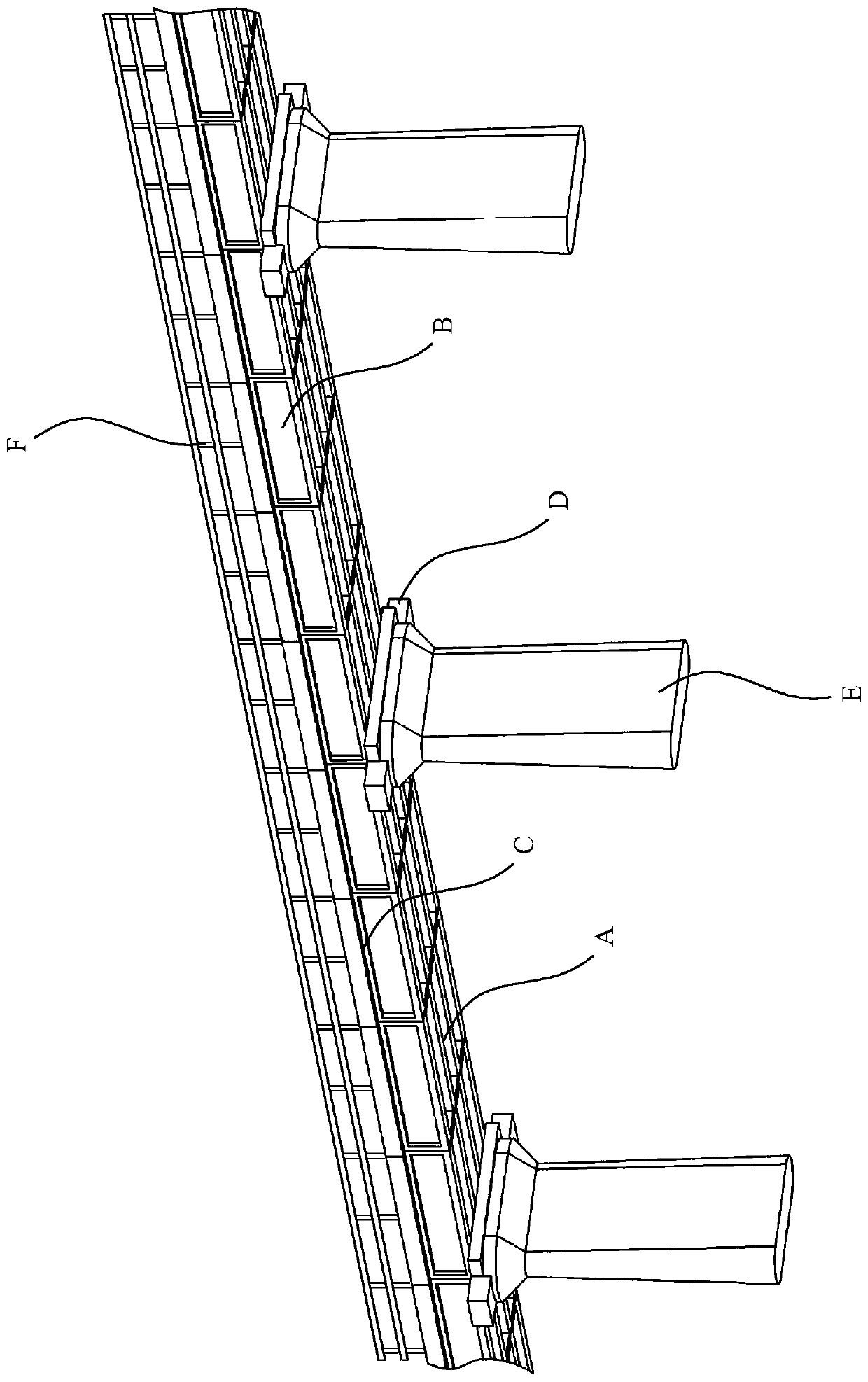
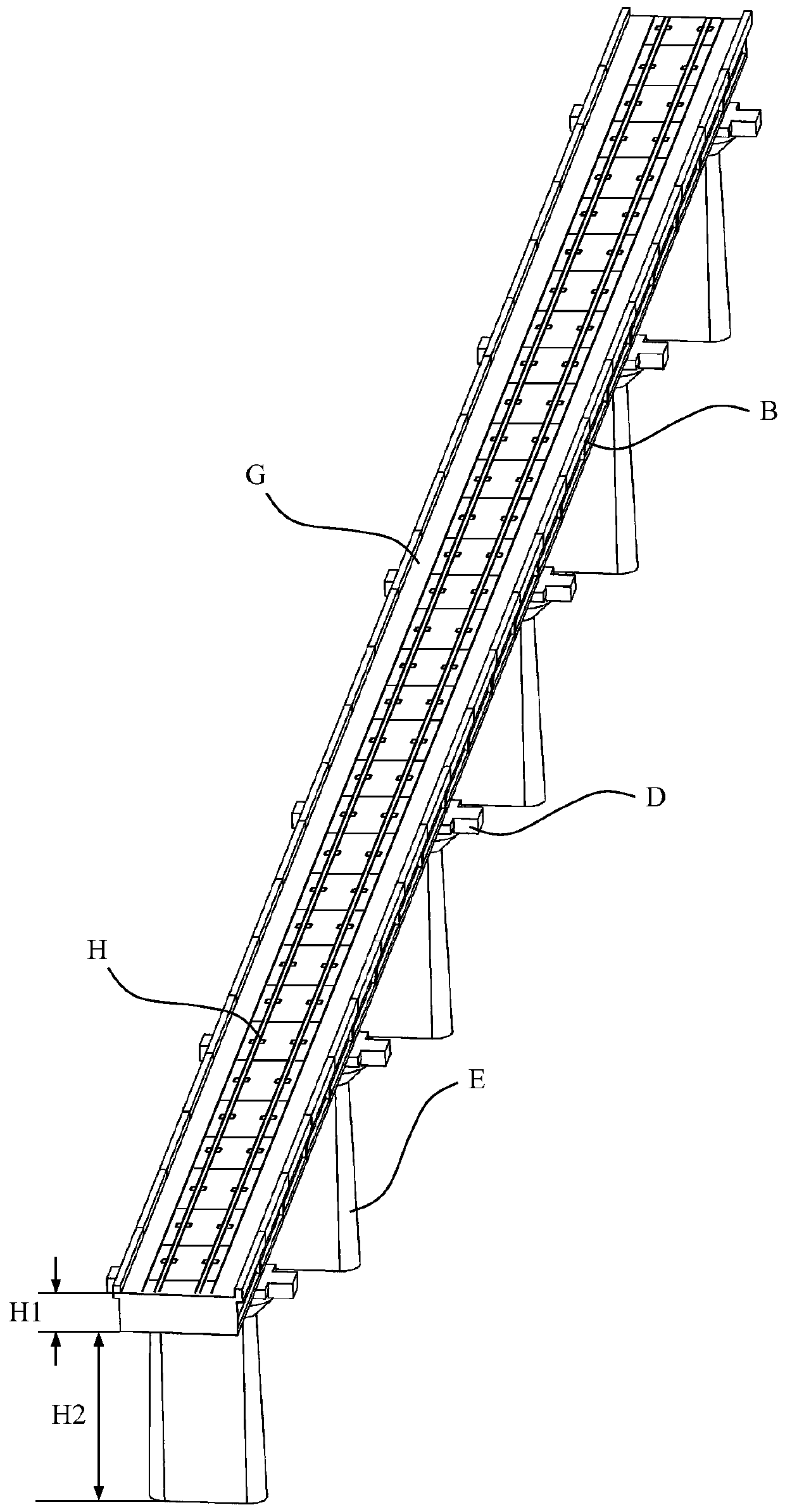
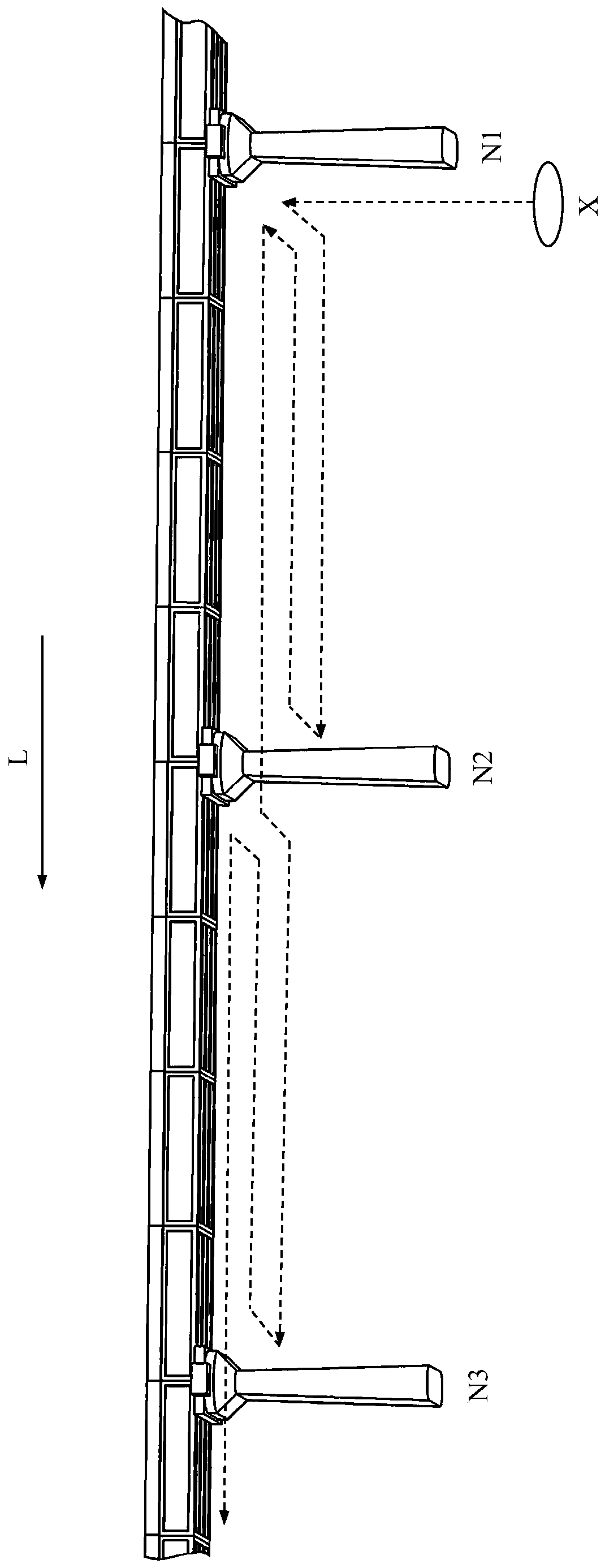
[0068] as attached image 3 And attached Figure 4 Shown, a kind of embodiment of the bridge bottom surface inspection route planning method of the present invention, specifically comprises the following steps:
[0069] Operate the unmanned aerial vehicle 10 to carry out patrol inspection along the length direction of the line under the bridge bottom surface (the inspection direction is the bridge pier body N1 → N3 direction), and carry out image acquisition to the bridge bottom surface by the pan-tilt camera 12, simultaneously the UAV 10 The flight route is fused with the information of the pan / tilt camera 12 including attitude angle, shooting angle, frame rate, focal length and exposure time to generate an inspection route. During the inspection process, the inertial measurement module 17, the vision module 18 and the laser radar 19 are used for navigation, and the UAV 10 flies a certain distance under the bottom of the bridge (the fusion navigation technology of the vision...
Embodiment 2
[0083] as attached Figure 7 Shown, a kind of embodiment of the bridge inspection route planning method based on the method of the present invention, specifically comprises the following steps:
[0084] S100) setting up the reference station 4;
[0085] S200) prepare the unmanned aerial vehicle 10, and set the no-fly area through the ground station 20;
[0086] S300) Manually operate the unmanned aerial vehicle 10 to perform the first inspection operation on the area of the bridge that needs to be inspected, including the bottom surface, outer edge surface, base, pier body and side rails, and plan corresponding inspection routes for each part of the bridge;
[0087] S400) After the inspection route planning for each part of the bridge to be detected is completed, load the corresponding inspection route to the flight control module 16, so as to control the UAV 10 to perform automatic inspection operations.
[0088] Step S100) further includes the following process:
[0089...
Embodiment 3
[0101] as attached Figure 8 As shown, an embodiment of the bridge inspection system of the present invention specifically includes: an unmanned aerial vehicle system 1 and a ground terminal system 2 . The unmanned aerial vehicle system 1 further includes an unmanned aerial vehicle 10, and an airborne data processing unit 11, a pan-tilt camera 12, a flight control module 16, an obstacle avoidance module 110 and a positioning module 111 mounted on the unmanned aerial vehicle 10, and the ground terminal system 2 further comprises a ground station 20. The UAV 10 performs the first inspection operation on the bridge to be detected under manual operation, and collects bridge surface data through the pan-tilt camera 12, and according to the positioning signal obtained by the positioning module 111 (such as: using GNSS signals, Global Navigation Satellite System, The abbreviation of global navigation satellite system, such as GPS, Glonass, Galileo, Beidou satellite navigation system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More