Ultrasonic image and CT image fusion real-time navigation system and method
A technology of CT image and ultrasound image, applied in the field of real-time navigation system of ultrasound image and CT image fusion, can solve the problems of insufficient resolution of ultrasound image, unable to accurately describe the location and boundary of lesion area, etc., to increase ease of use, reduce Operation time, wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
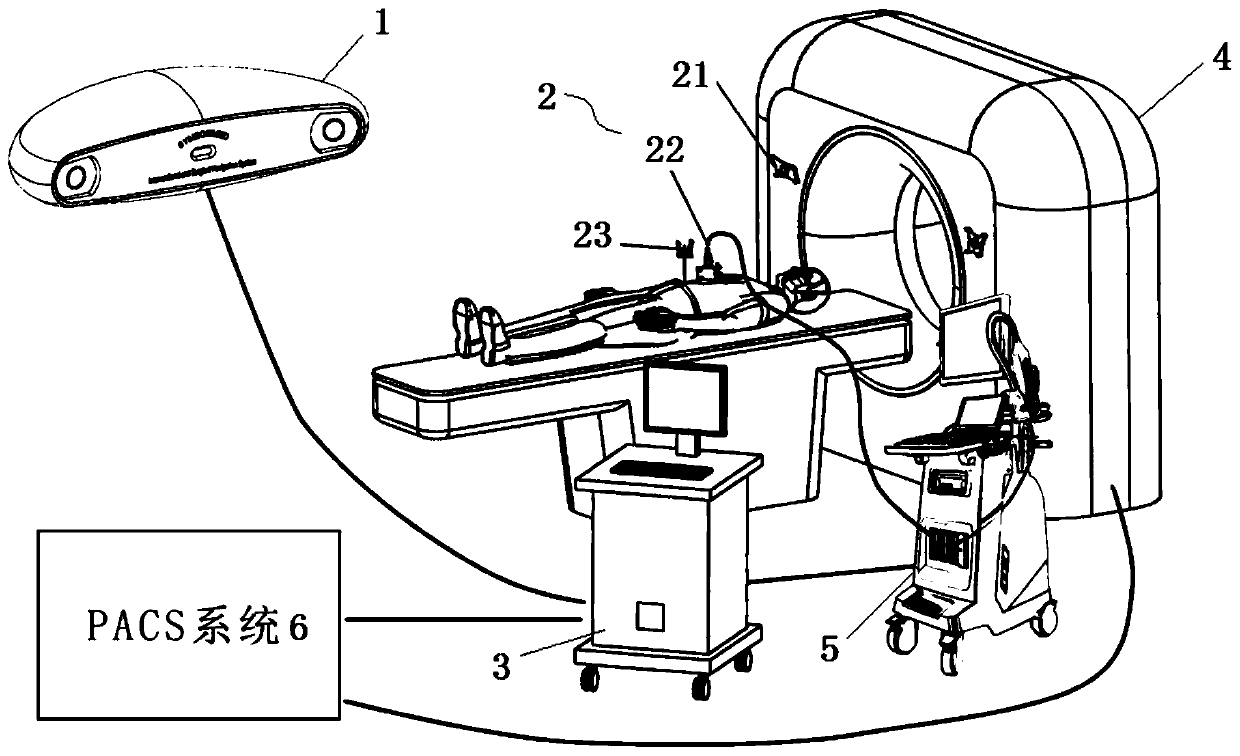
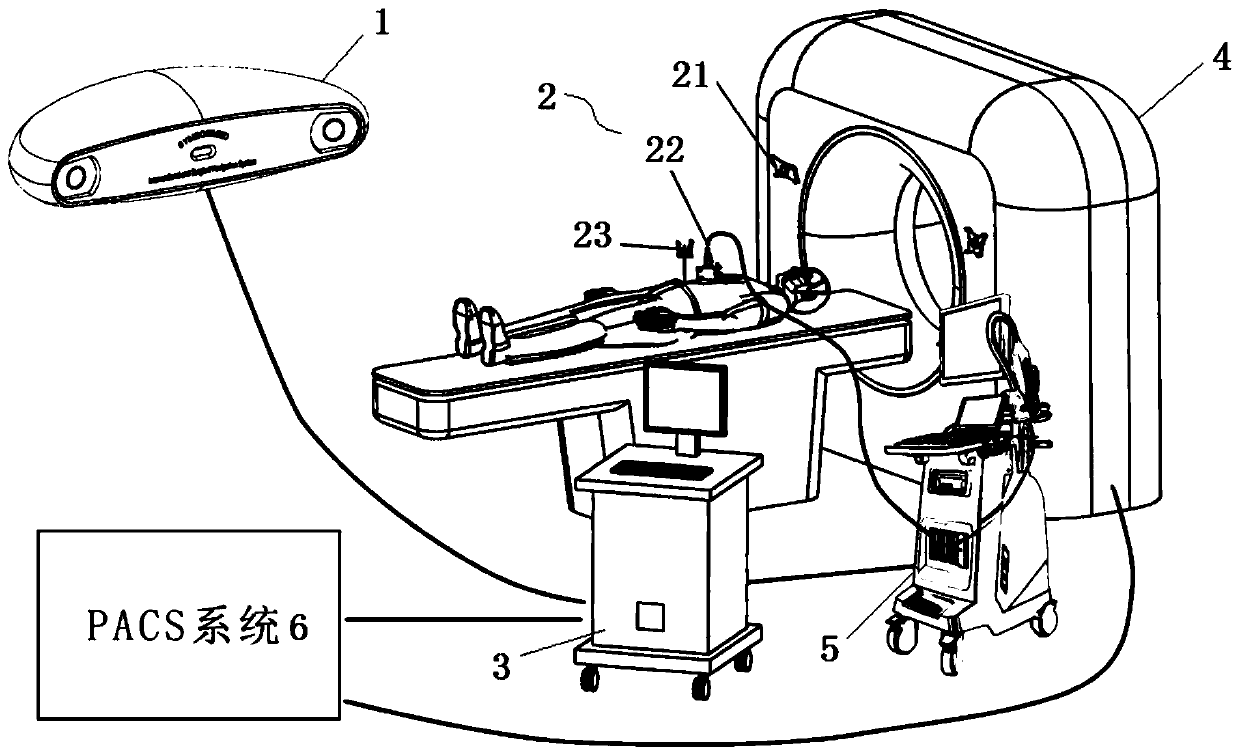
[0031] Such as figure 1 As shown, a real-time navigation system for ultrasonic image and CT image fusion provided by the present invention is applied to CT image-guided percutaneous minimally invasive operating room, and the system includes: navigation positioning sensor 1, navigation tracer 2, image processing server 3. Existing CT equipment 4, surgical instruments, ultrasound equipment 5 and PACS system 6. Wherein, the navigation positioning sensor 1 tracks the position of the ultrasonic probes of the CT equipment 4, surgical instruments, and ultrasound equipment 5 through the navigation tracer 2, and sends them to the image processing server 3; 4. The ultrasound equipment 5 is connected to the PACS system 6, and the preoperative volume images (including CT images, magnetic resonance images, PET images and CBCT (cone beam CT) images), intraoperativ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More