

Crawling robot leg device suitable for slope road surface and control method of crawling robot leg device
A crawling robot and leg technology, applied in the field of robotics, can solve the problems of lack of shock absorption mechanism, balance movement margin of legs, influence of leg movement coordination, and large energy loss of stepping motors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
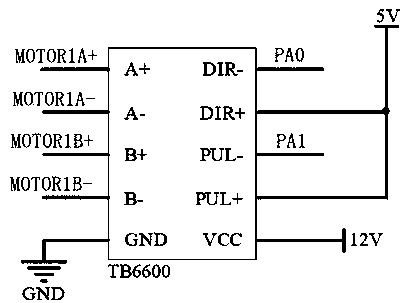
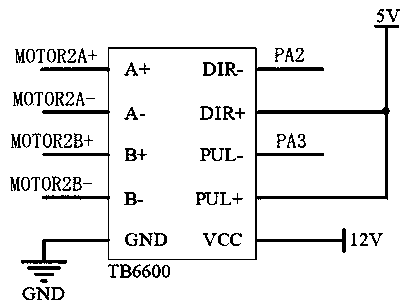
[0066] A crawling robot leg device suitable for slope roads, such as Figure 1-6 , Figure 10-13 As shown, it includes 1 hip joint, 2 knee joints, 3 leg mechanisms, 4 foot devices and 5 control systems; in the initial state, the 1 hip joint is connected to the 2 knee joints horizontally, and the 2 knee joints are connected to the 3 leg The mechanism forms a 90-degree connection, the 3 leg mechanism is connected vertically with the 4 foot device, and the 5 control system is placed on the 1 hip joint;
[0067] The 1 hip joint includes a 1-1 U-shaped support frame, a 1-2 first stepper motor, a 1-3 first metal plate, and a 1-4 hip joint support frame; the 1-2 first stepper motor and 1 - The 4 hip support frame is fixedly connected, and the 1-1U-shaped support frame is rotationally connected with the 1-3 first metal plate, and the 1-3 first metal plate is fixedly connected with the 1-1U-shaped support frame, and the 1-1 U-shaped support frame is fixedly connected. 4 The hip joint...
specific Embodiment approach 2
[0079] Such as figure 1 , Figure 7-9 As shown, on the basis of Embodiment 1, a crawling robot leg device suitable for slope road surfaces includes 1 hip joint, 2 knee joints, 3 leg mechanisms, 4 foot devices and 5 control systems, the 3 The leg mechanism includes a 3-1 shock absorbing mechanism and a 3-2 rotating mechanism, and the 4-foot device includes a 4-1 three-dimensional force sensor and a 4-2 foot structure; the 3-1 shock absorbing mechanism includes a 3-1A Leg connecting plate, 3-1B shaft cylinder, 3-1C central shaft, 3-1D two round nuts, 3-1E spring preload block, 3-1F spring; said 3-1A leg connecting plate is connected with 2 The first connection plate of the -5 knee joint, the second connection plate of the 2-6 knee joint, and the 3-1B shaft tube are fixedly connected. A round nut limit, the 3-1C center shaft adopts a hollow structure, the 3-1E spring preload block is coaxially matched with the 3-1C center shaft, and the 3-1E spring preload block is connected wi...
specific Embodiment approach 3
[0093] Such as Figure 14 , Figure 15 As shown, a control method of the leg device of a crawling robot suitable for slope road surfaces, when the right front leg is turned from the swing phase to the support phase, the right front leg lands and the other three legs are in the support state as an example, including the following steps:
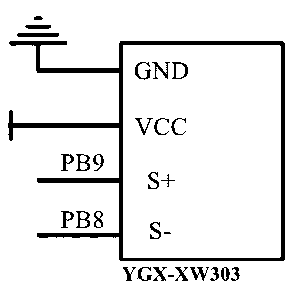
[0094] Step S1. When the crawling robot is traveling on a slope, the three-dimensional force sensor measures the contact force in the X, Y, and Z directions of the end of the leg;
[0095] Step S2, the main control chip takes the received contact force information as a reference and obtains the actual control position P of the leg end according to the slope gradient θ p ;
[0096] Step S3, the main control chip controls the position P according to the actual leg end p Perform single-leg inverse kinematics to obtain the desired angle θ of the right front leg hip joint 11d , The desired angle θ of the knee joint of the right front leg 12d ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More