

Artificial potential field path planning method of flexible needle based on obstacle grading and device
A path planning, artificial potential field technology, applied in image analysis, surgical robot, computer-aided planning/modeling, etc., can solve problems such as large motion uncertainty, unstable solution, no solution, etc., to improve tracking control accuracy , improve the solution range, improve the effect of feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described in detail below in conjunction with accompanying drawings and examples.
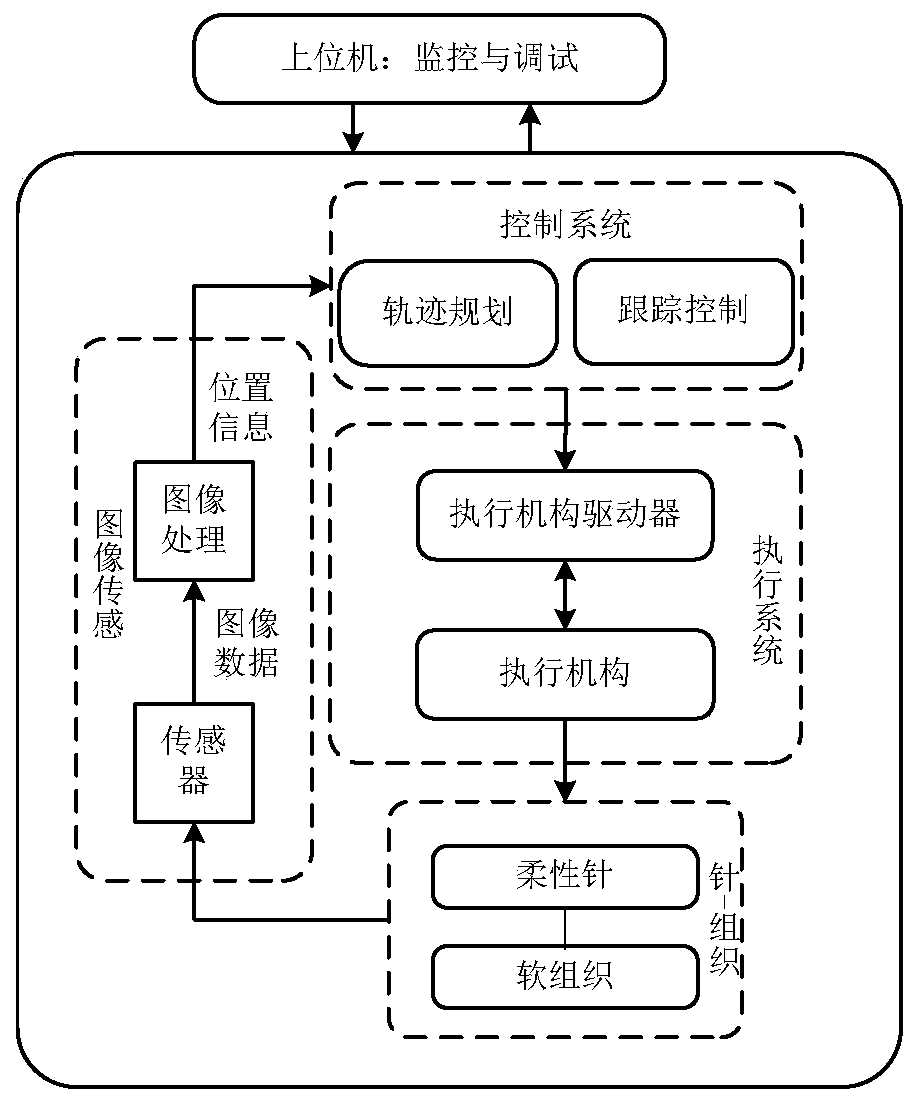
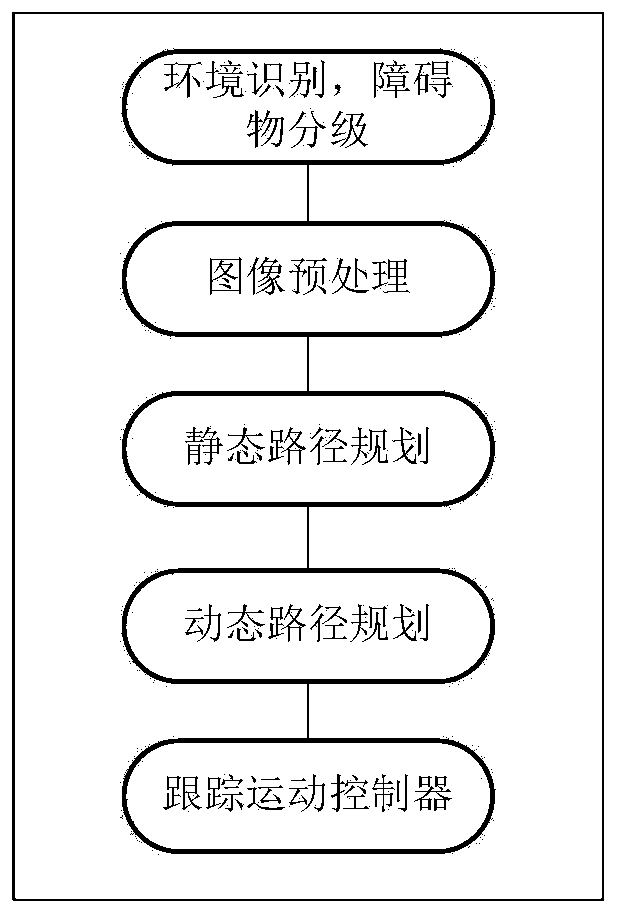
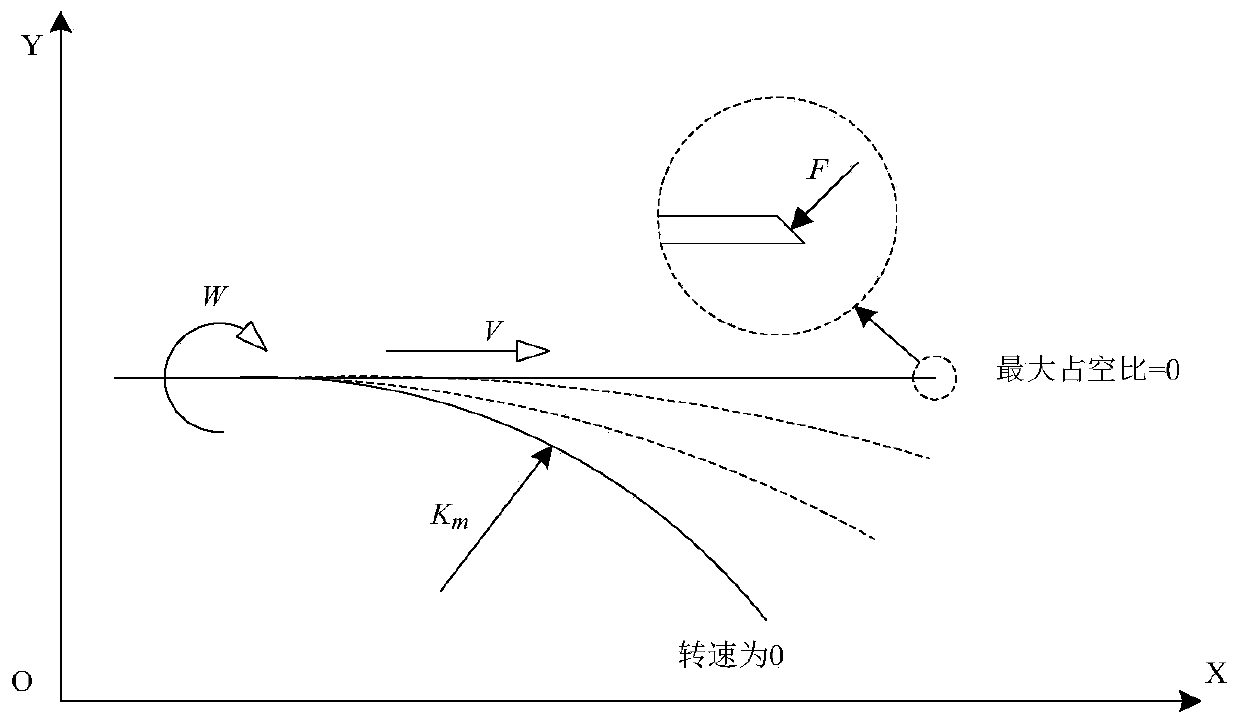
[0025] The present invention provides a flexible needle path planning method and device based on the artificial potential field based on the classification of obstacles based on the characteristics of flexible needles. Through the artificial potential field method, the potential energy functions of different tissues are set to realize the differentiation of obstacles, and it is convenient to obtain reasonable path of. On the one hand, the artificial potential field method can obtain a stable path when the environment and related parameters remain unchanged. On the other hand, considering the dynamic characteristics of the flexible needle and the requirements of puncture surgery, an optimization index based on the kinematic characteristics of the flexible needle is set function, the kinematics characteristics of the flexible needle are considered in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More