

Multi-unmanned system supervision and control station based on MAS
A technology of a supervisory control system and a control station, which is applied in the field of MAS-based multi-unmanned system supervisory and control stations, can solve the problems of not building an integrated multi-agent monitoring operator state monitoring, environment complexity and task complexity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the purpose, technical solutions and advantages of the present disclosure clearer, the present invention will be further described in detail below in conjunction with specific embodiments and according to the accompanying drawings. It should be noted that, in the drawings or descriptions in the specification, the content not described and some English abbreviations are the content well known to those of ordinary skill in the art. Some specific parameters given in this embodiment are only for demonstration, and the values may be correspondingly changed to appropriate values in different real-time manners.
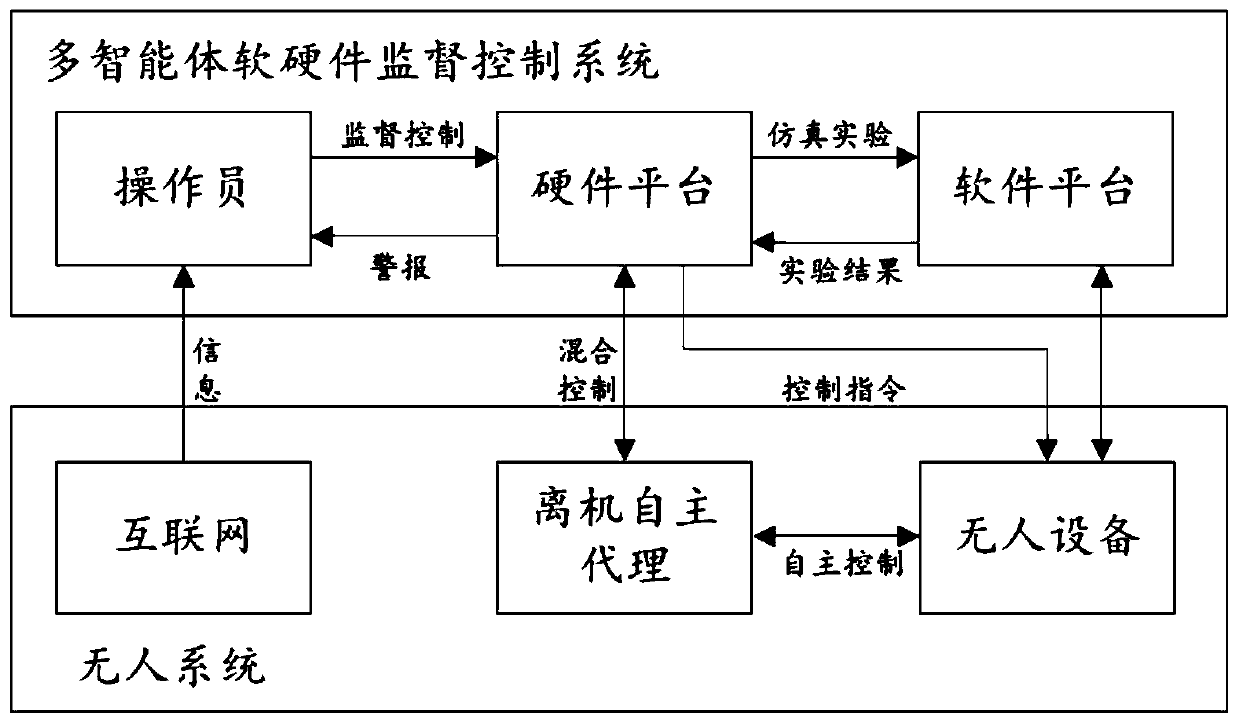
[0064] Such as Figure 1-2 The shown MAS-based multi-unmanned system supervisory control station includes a parallel system architecture, which includes a multi-agent software and hardware supervisory control system and an unmanned system. Among them, unmanned equipment, off-machine autonomous agent equipment and the Internet together form an unm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More