

Unmanned vehicle cluster optimal gathering controller and design method thereof
A technology of unmanned boats and controllers, applied in the field of optimal aggregation controllers of unmanned boat clusters, can solve problems such as failure to achieve optimal results, large neural network calculation burden, and large communication bandwidth, and achieve a distributed control method Flexible, strong resistance to individual failure, and the effect of reducing computing load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings.
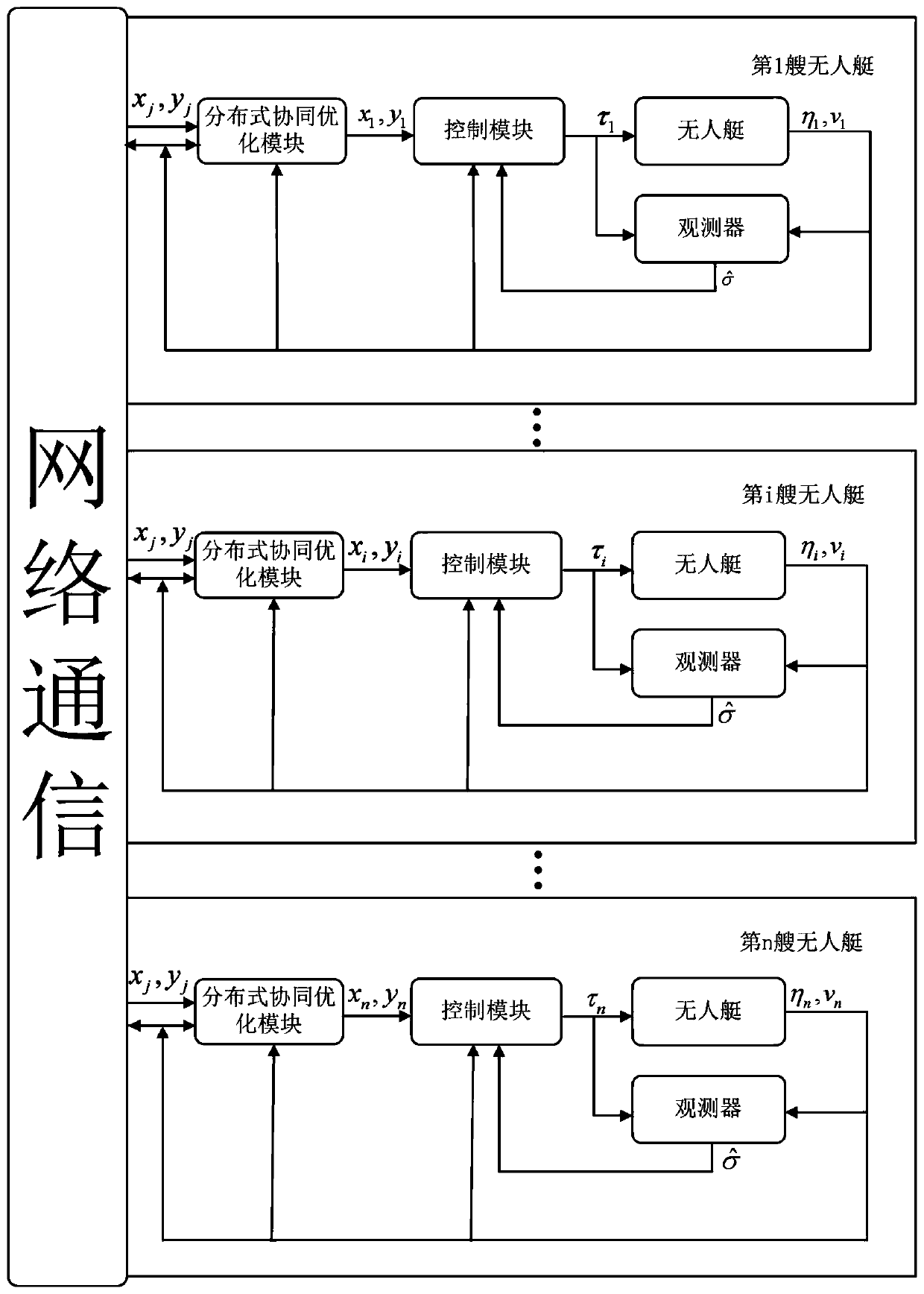
[0059] Below, the present invention will be further described by taking a specific unmanned boat swarm optimal aggregation controller as an example, figure 1 Shown is the structural representation of the present invention. The unmanned boat in the optimal aggregation controller of the unmanned boat swarm satisfies the dynamic model in formula (1), and the specific parameters of the model are as follows:
[0060]
[0061]
[0062]
[0063] Among them, x(4), x(5) and x(6) are the lateral velocity, longitudinal velocity and velocity in the direction of the yaw angle of the UAV, respectively.
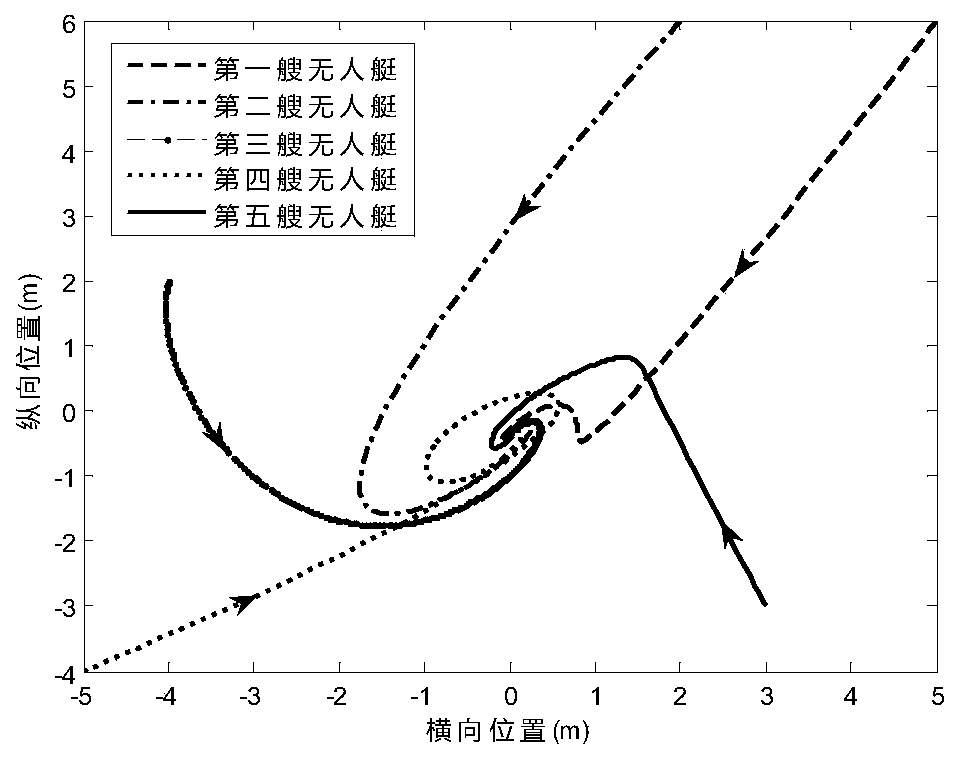
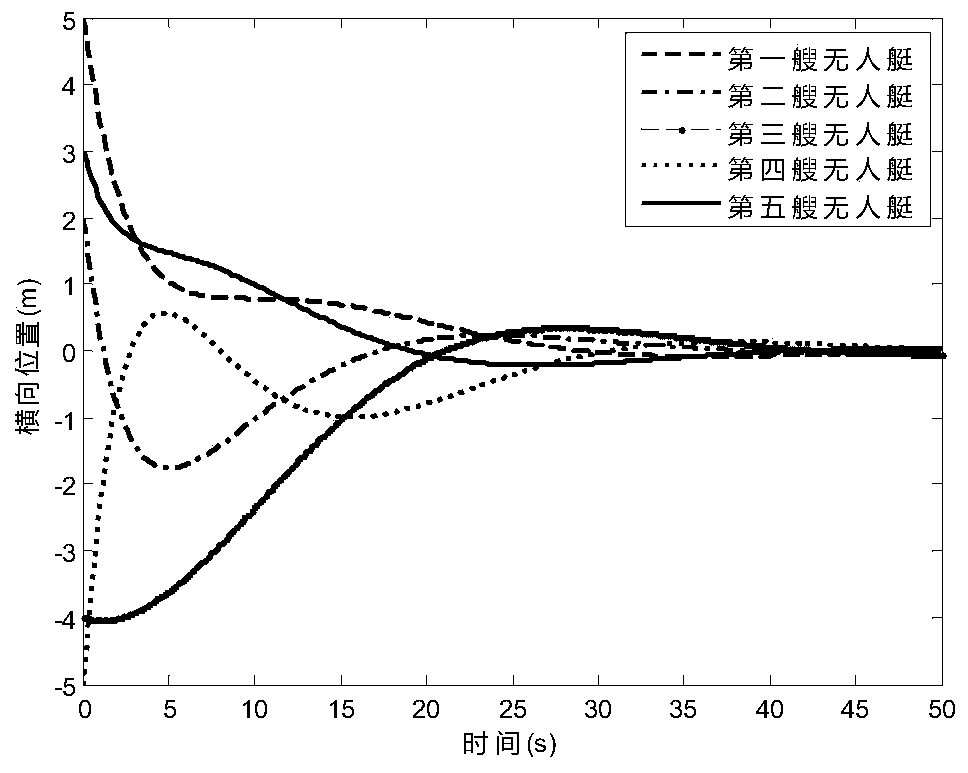
[0064] The initial values of the five unmanned boats are as follows: the initial position of the first unmanned boat is q 1 (0)=[5 6 7] T , the initial position of the second unmanned boat is q 2 (0)=[2 6 1] T , the initial position of the third unmanned boat is q ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More