

Easy-to-wear multi-connecting-rod structure teleoperation controller assisted by stereoscopic vision
A stereo vision and wearable technology, which is applied in the field of wearable multi-link structure teleoperation controller, can solve the problems of inability to quickly enter and leave the remote control scene, unsatisfactory control precision, and large equipment size, etc., to achieve overall The effect of large size, low cost and reduced investment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
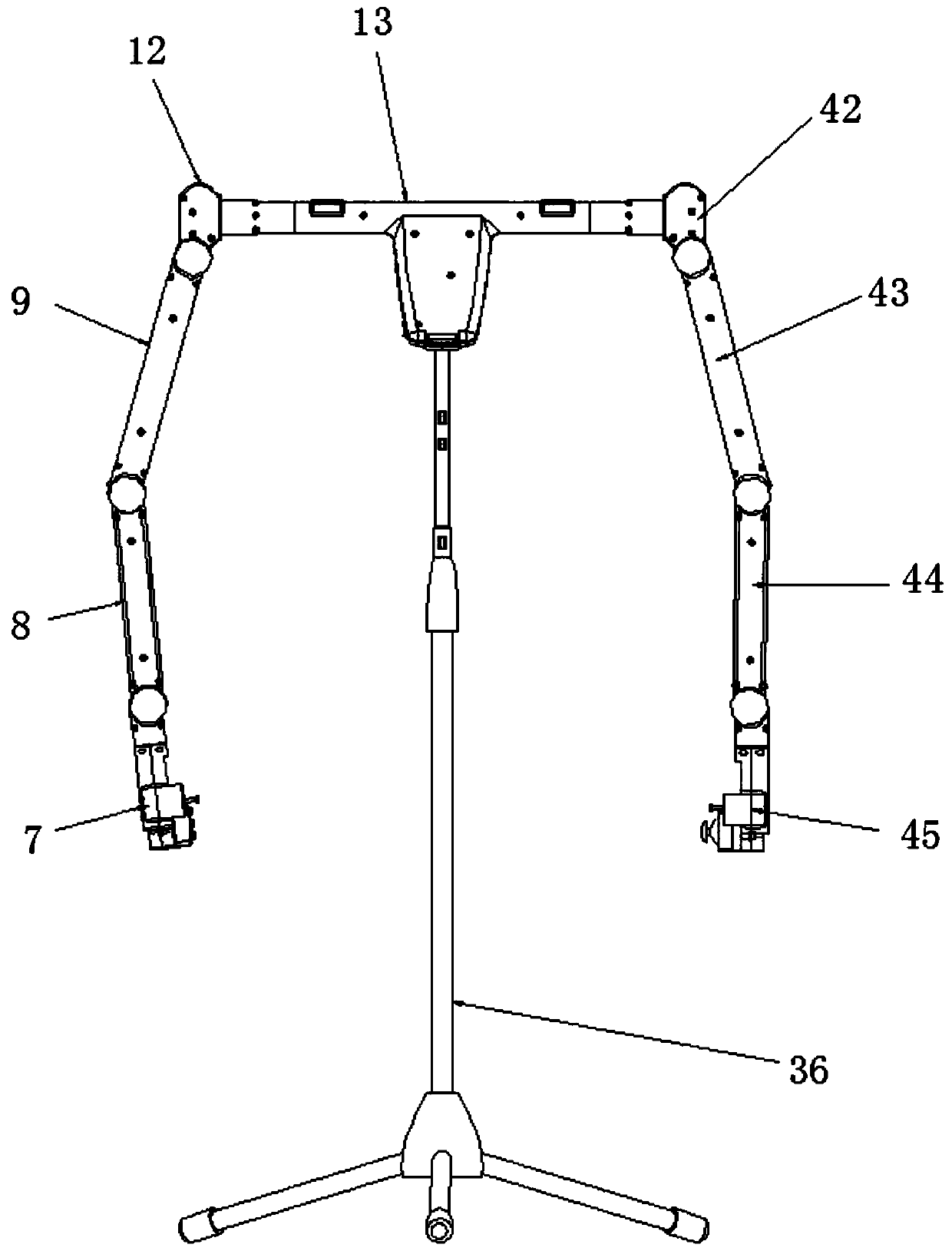
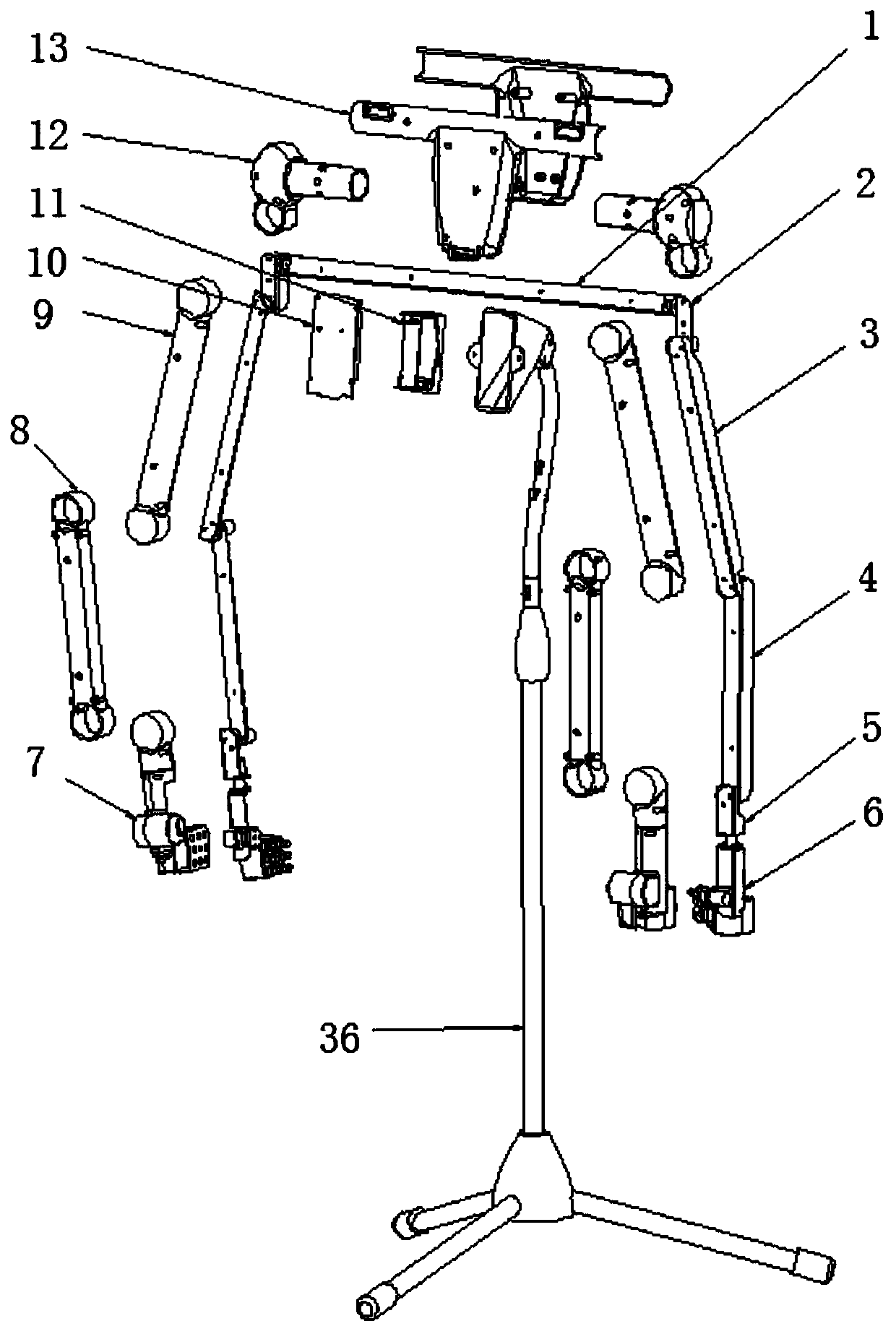
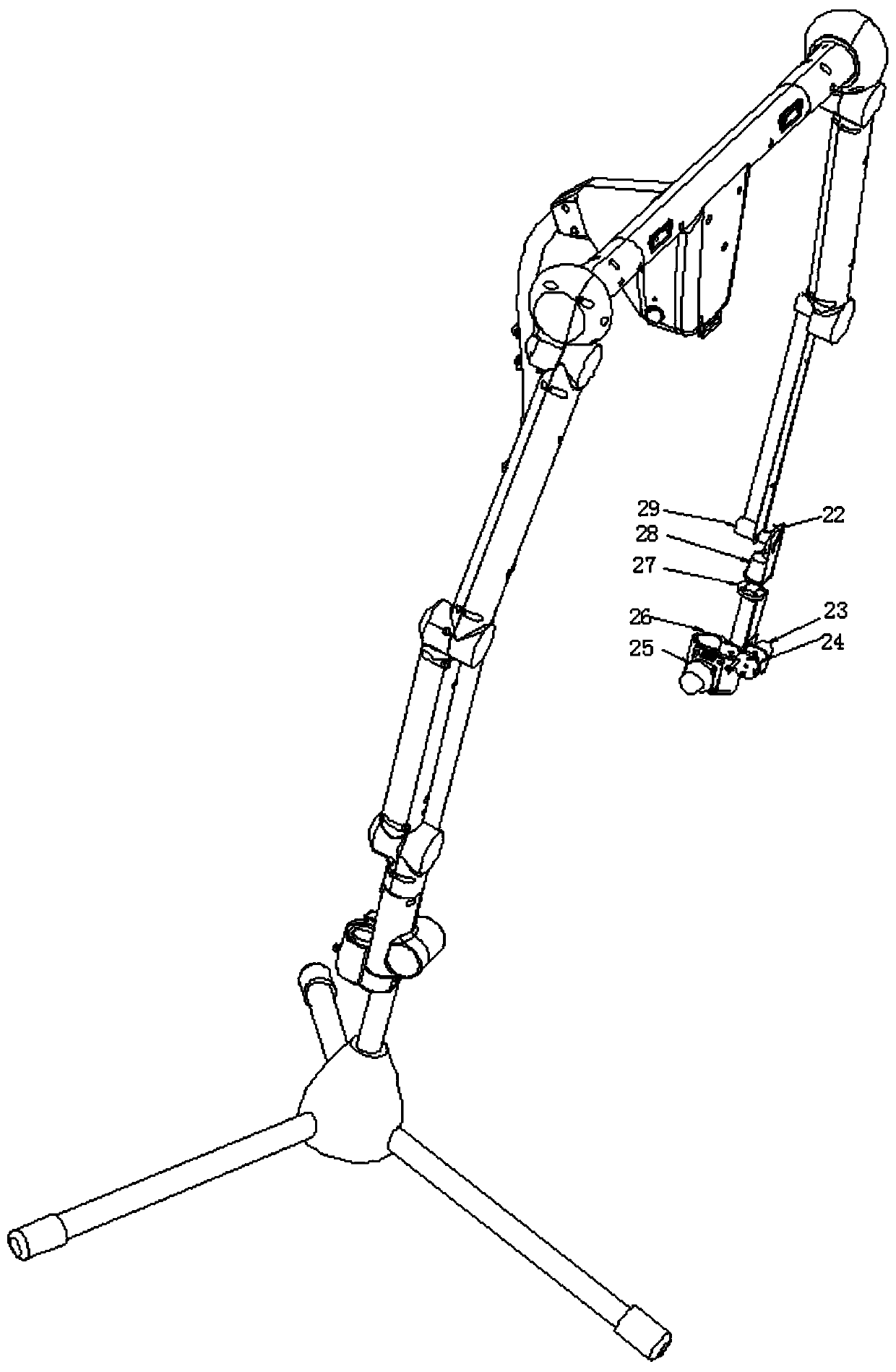
[0033] Please see attached figure 1 to attach Figure 8 As shown, the present invention provides a technical solution: an easy-to-wear multi-link remote operation controller with stereo vision aid, including a main link 1, a left shoulder link 2, a left upper arm link 3, and a left lower arm link 4. Left wrist link 5, left palm link 6, right palm wrist shell 7, right lower arm shell 8, right upper arm shell 9, control board 10, power module 11, right shoulder...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More