

Ligament stiffness robot in-situ measuring system and method during anterior cruciate ligament reconstruction surgery
An anterior cruciate ligament and measurement system technology, applied in surgical robots, surgical navigation systems, instruments, etc., can solve the problems of inaccurate detection, low detection accuracy, and low repeatability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
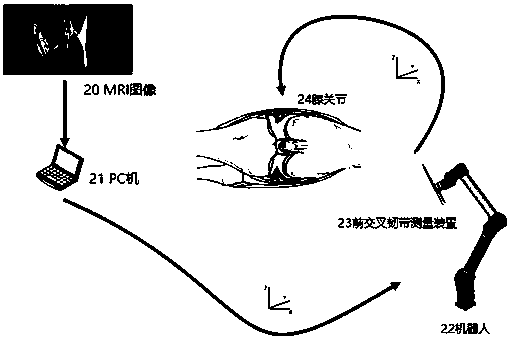
[0055] Embodiment one: see figure 1 , Figure 3 ~ Figure 8 , the robotic in-situ measurement system for ligament stiffness in anterior cruciate ligament reconstruction, comprising: preoperative MRI images, a PC, a robot, an anterior cruciate ligament stiffness measurement device and a knee joint, the anterior cruciate ligament stiffness measurement device is installed at the end of the robot , and PC, robot and anterior cruciate ligament stiffness on-site measuring device are connected by bus to communicate; the patient's knee joint is scanned continuously before operation to obtain MRI images, and the anterior cruciate ligament in the knee joint is analyzed through the analysis of MRI images Position information, input the obtained position information into the PC, make the robot reach the measurement position with the anterior cruciate ligament stiffness measurement device, and then extend into the knee joint through the anterior cruciate ligament stiffness measurement devic...
Embodiment 2
[0056] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
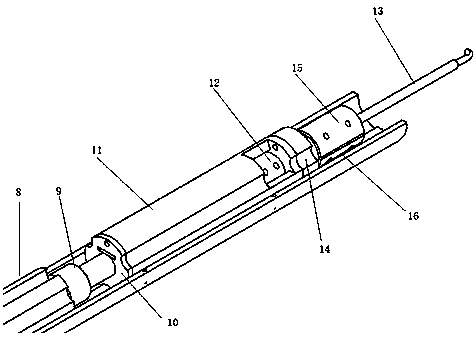
[0057] 1) The anterior cruciate ligament stiffness measurement device is a series measurement mechanism composed of a linear motion mechanism, a force measurement mechanism and a rotation mechanism connected in sequence. It includes the arc-shaped hand-held end, the upper split of the guide housing, the lower split of the guide housing, and the interior of the housing contains a linear servo motor, a half-coupling, a screw with a half-coupling, bearing A, and a guide nut with evenly distributed grooves. Seat, tension and pressure sensor, guide motor compartment end cover, guide motor compartment, coupling, medical probe hook, bearing seat, probe hook coupling upper split, probe hook coupling lower split, bearing B, probe hook Rear mount and rotary servo motor. As mentioned above, the measuring mechanism is located between the linear motion mechanism and the r...
Embodiment 3
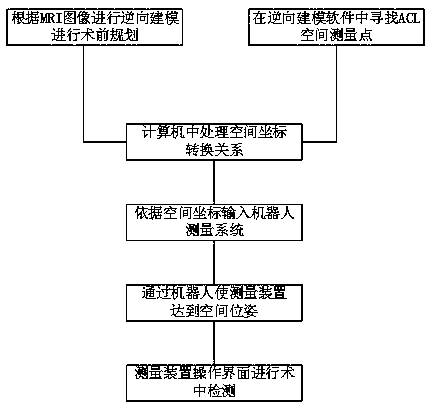
[0063] Embodiment 3: In this anterior cruciate ligament reconstruction operation, the ligament stiffness robot in-situ measurement system performs measurement system and method, and its specific operation steps are as follows:
[0064] 1) Preoperatively scan the patient's knee joint, and import the MRI tomographic image data of the knee joint stored in accordance with the DICOM standard into the medical image processing software through the software input port on the computer, and estimate the length, width and thickness of the reconstructed ligament according to the image;
[0065] See figure 1 , a robotic in-situ measurement system for ligament stiffness during anterior cruciate ligament reconstruction, comprising: a preoperative MRI image 20, a PC 21, a robot 22, an anterior cruciate ligament stiffness measurement device 23, and a knee joint 24, characterized in that: The anterior cruciate ligament stiffness measurement device 23 is installed at the end of the robot 22, and...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More