

Human-simulated intelligent rotating speed control method for brushless direct -current motor
A brush DC motor and speed control technology, which is applied in the direction of single motor speed/torque control, motor control, control system, etc., can solve the problems of large speed fluctuations in the sudden load stage and slow response in the motor start-up stage, etc., to achieve brushless The DC motor has a smooth speed response curve, simple human-like thinking, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
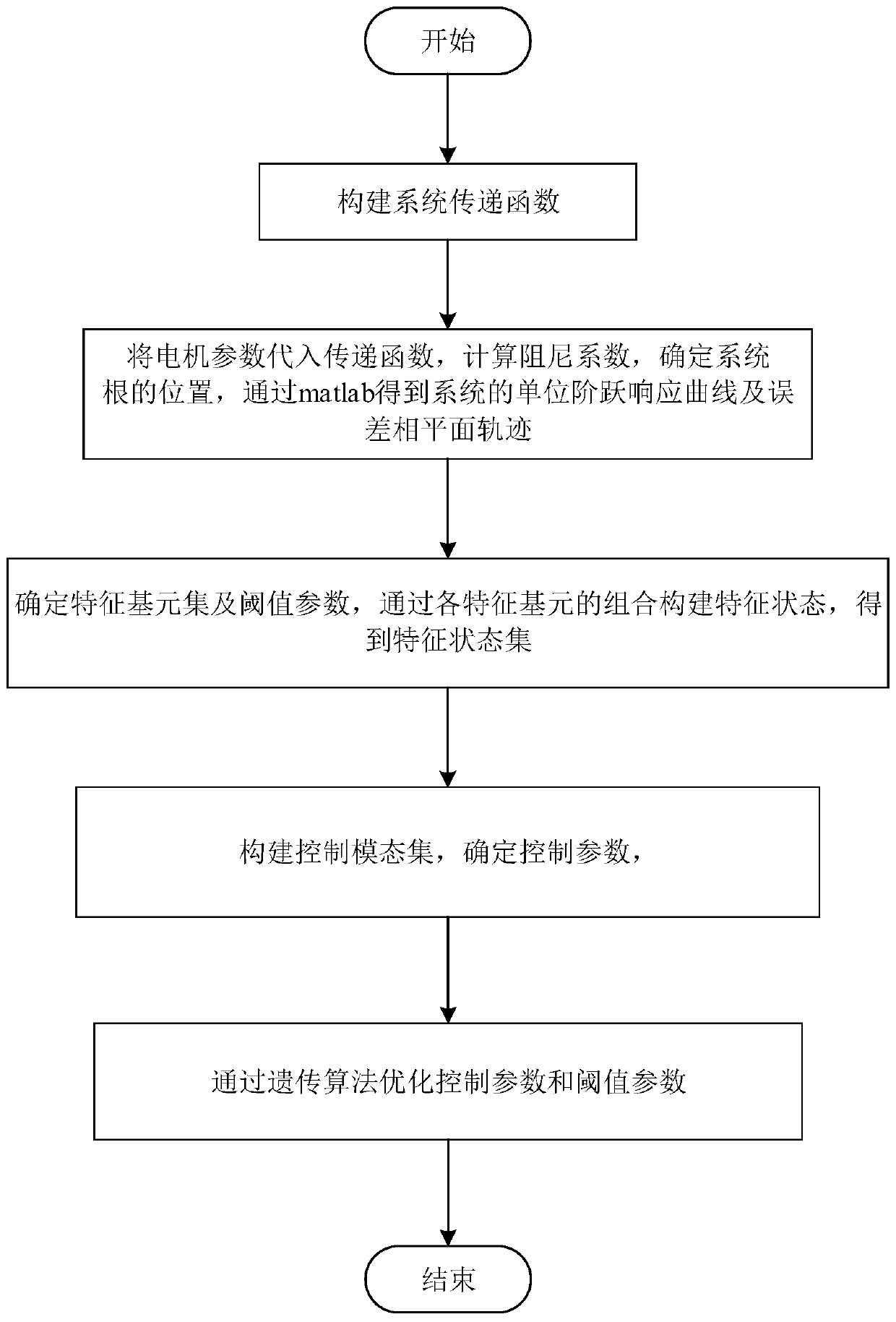
[0072] Please refer to figure 1 , the present embodiment provides a brushless DC motor humanoid intelligent speed control method, comprising the following steps:
[0073] S1. Constructing the transfer function of the speed control system of the brushless DC motor;
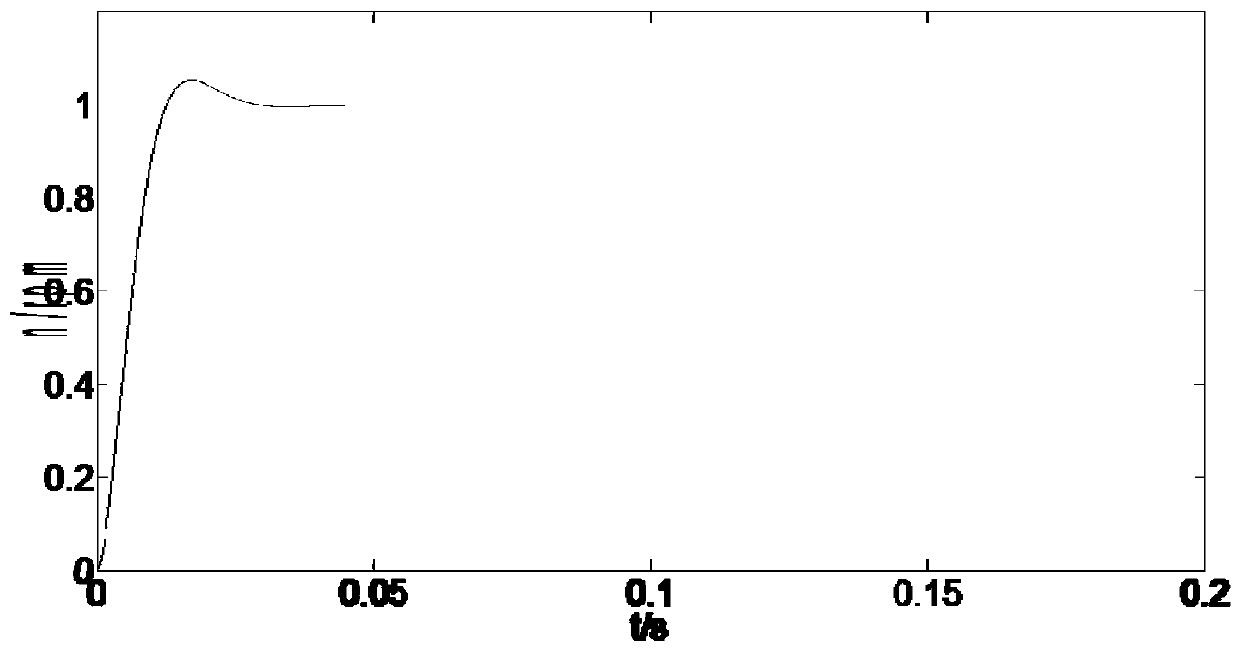
[0074] S2. Substitute the motor parameters into the transfer function, calculate the damping coefficient of the speed control system, determine the root position of the speed control system, and obtain the unit step response curve and error phase plane trajectory of the speed control system through matlab. The motor parameters include stator phase windings Resistance, stator phase-to-phase inductance, rotor moment of inertia, number of pole pairs, rated speed, torque coefficient and back EMF coefficient;
[0075] S3. According to the trajectory of the error phase plane, determine the characteristic primitive set and the threshold parameter, construct the characteristic state through the combination of each charact...
Embodiment 2
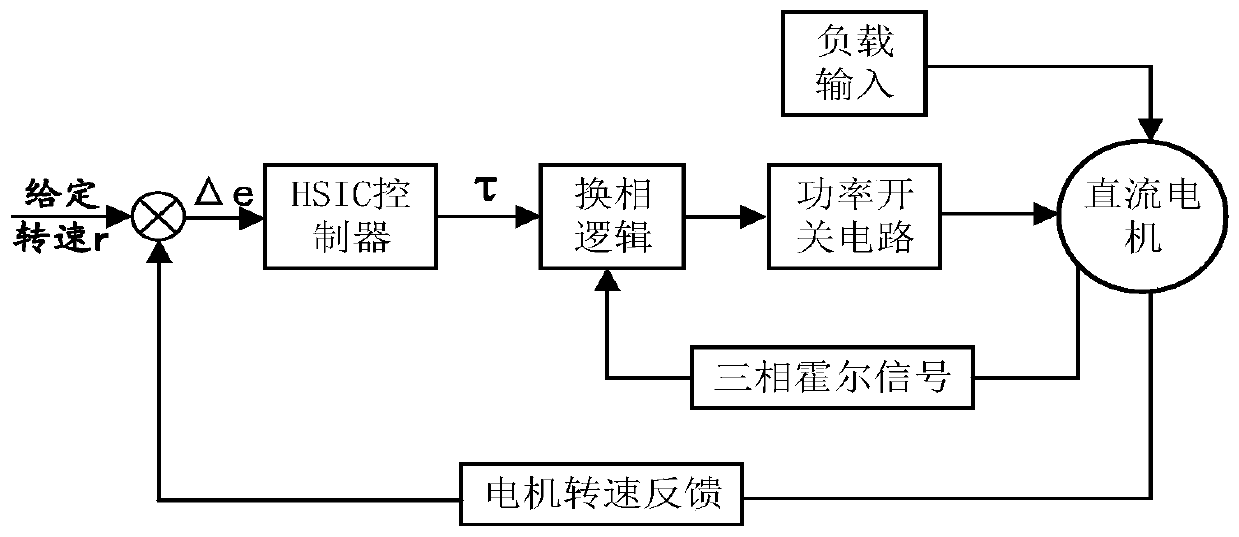
[0081] Compared with Embodiment 1, a two-pole three-phase motor is selected for the brushless DC motor, and the control for the two-pole three-phase brushless DC motor is as follows:
[0082] 1. Construct the transfer function of a two-pole three-phase brushless DC motor
[0083] Please refer to figure 2 , The motor is driven by a three-phase full bridge, and the stator windings are energized in pairs. Each electrical cycle of the motor needs to undergo 6 commutations. The commutation torque ripple caused by the commutation process has little influence on the electrical quantities in the model, so it is ignored here to simplify the model calculation.
[0084] It is approximately considered that only two-phase windings are turned on, and the currents are equal in magnitude and opposite in direction, as shown in formula (1):
[0085] i A =-i B = i (1)
[0086] The phase voltage equation of the brushless DC motor can be expressed by formula (2):
[0087]
[0088] The co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More