

Aircraft pose measurement method based on circular features and P3P algorithm
A pose measurement and aircraft technology, applied in the field of visual measurement, can solve problems such as large positioning errors, complex algorithms, complex nonlinear equations, etc., and achieve the effects of high accuracy, fast operation speed, and easy feature recognition and extraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
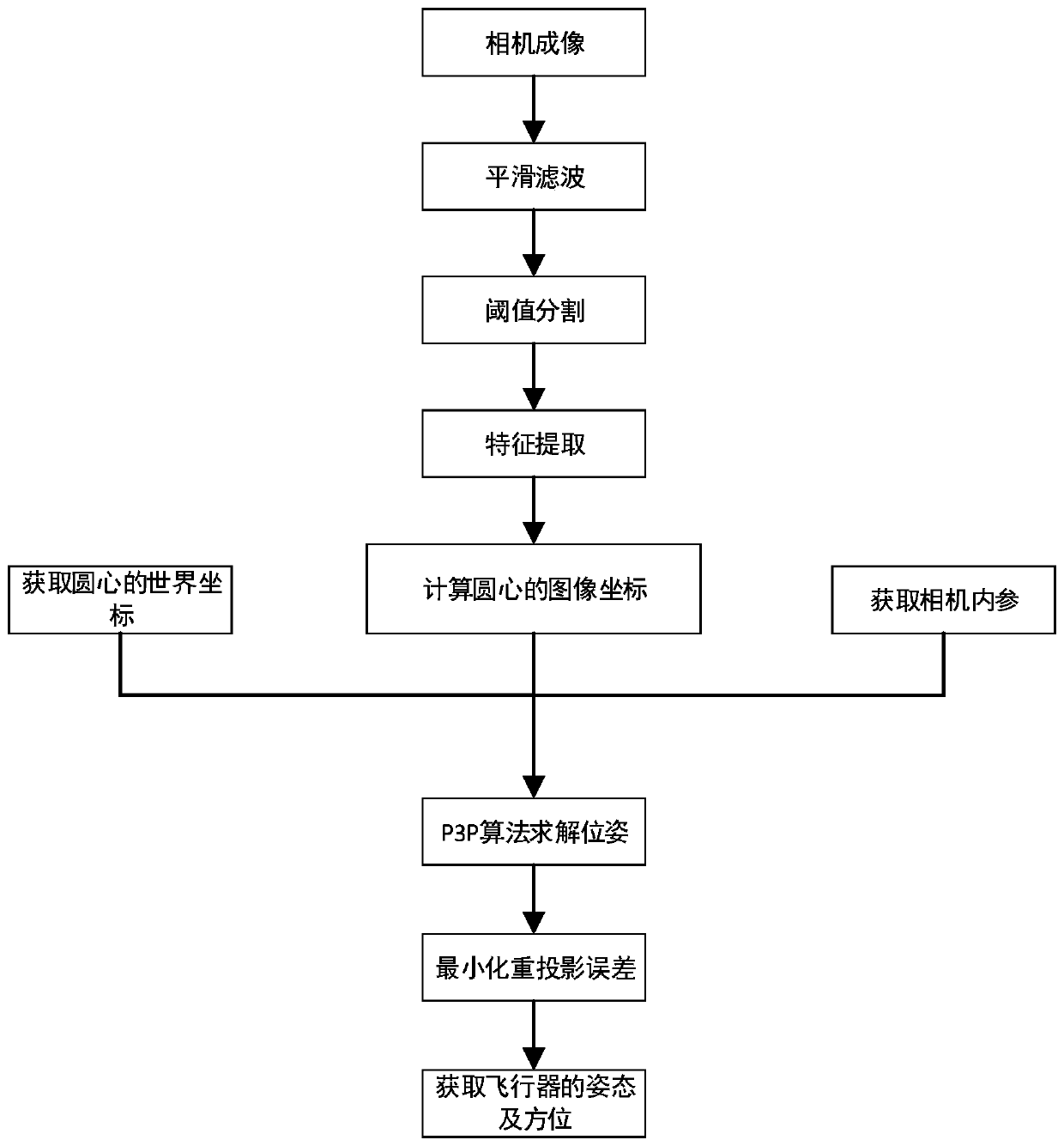
[0025] Please refer to figure 1 , the embodiment of the present invention provides a kind of aircraft pose measurement method based on circular feature and P3P algorithm, comprises the following steps:
[0026] S1. Use a monocular camera to take an image of the aircraft, and the aircraft is equipped with four targets for feature recognition and extraction, and determine the coordinates of each target in the world coordinate system;
[0027] Specifically, the monocular camera is located on the ground. First, the monocular camera is calibrated to determine the internal parameters of the camera. The image captured by the monocular camera is a grayscale image; the targets arranged on the aircraft are four different radii. For circular active targets with LE...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More