

Robot admittance compliance control method and system
A compliant control and robot technology, applied in the field of control, can solve the problems of poor compliant operation of robots and achieve the effect of improving compliant
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
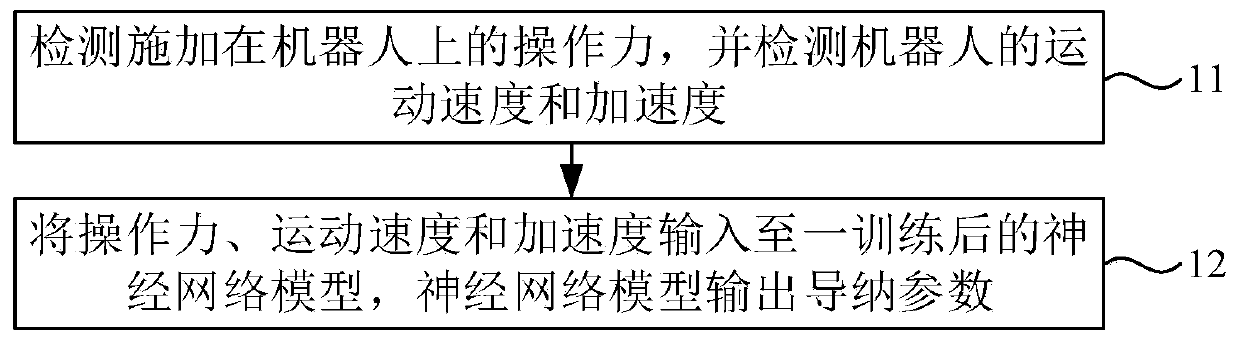
[0081] This embodiment provides a robot admittance compliance control method, such as figure 1 As shown, the robot admittance compliance control method includes:
[0082] Step 11, detecting the operating force applied to the robot, and detecting the moving speed and acceleration of the robot.
[0083] Step 12. Input the operating force, motion speed and acceleration into a trained neural network model, and the neural network model outputs admittance parameters, which include virtual damping and virtual mass.
[0084] The robot in this embodiment can be used for human-machine collaboration such as assisted medical treatment and artistic sculpture, and is especially suitable for assisted medical treatment. The embodiment of the present invention does not limit its specific application field. In addition, the robot should be understood in a broad sense, for example, the robot may be a mechanical arm capable of man-machine interaction and intelligent control.
[0085] The operat...
Embodiment 2
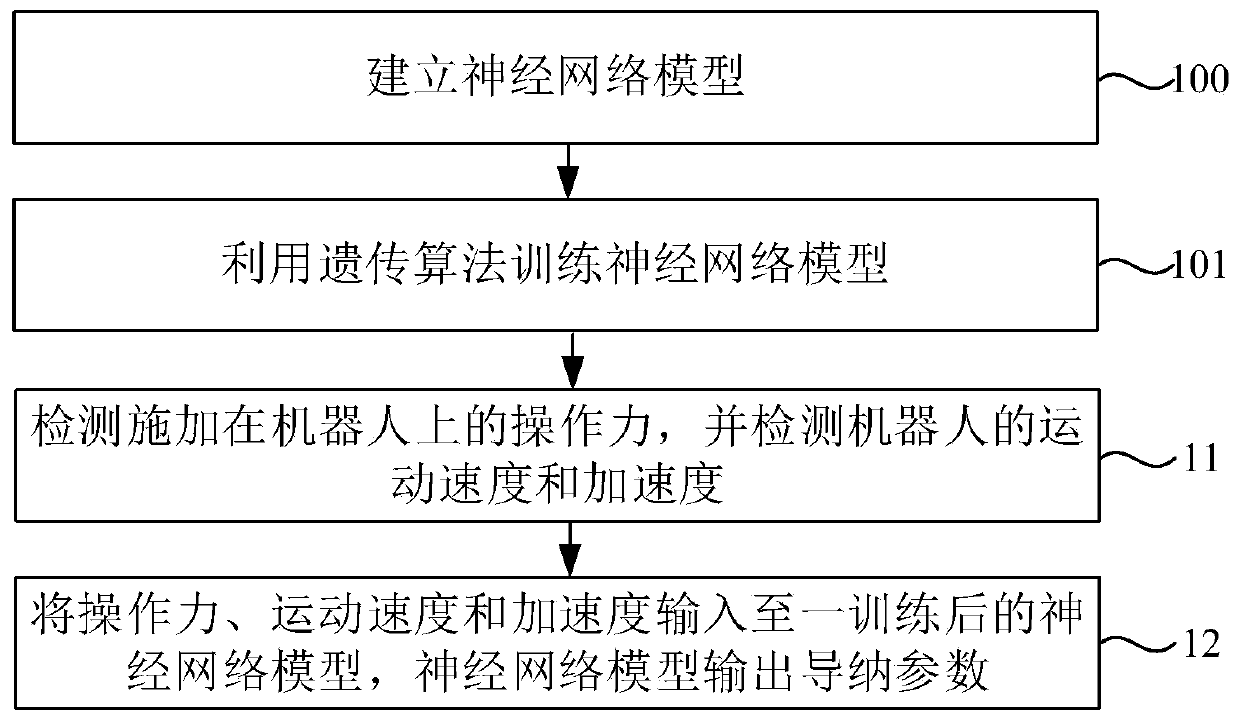
[0097] This embodiment provides a robot admittance compliance control method. Compared with Embodiment 1, this embodiment differs in that, as figure 2 As shown, before the step of inputting the operating force, motion speed and acceleration into a trained neural network model, it also includes:
[0098] Step 100, establishing a neural network model.
[0099] Step 101, train the neural network model by genetic algorithm.
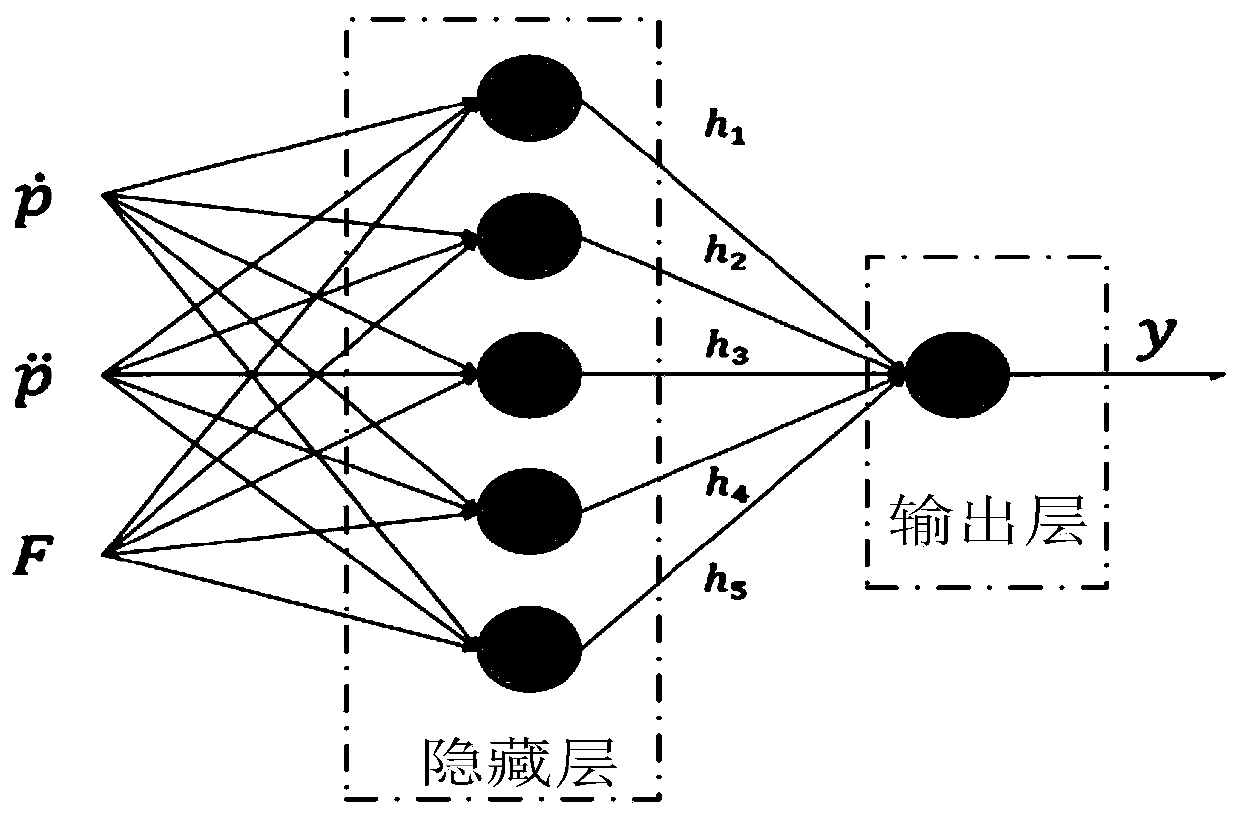
[0100] In this embodiment, the neural network model structure adopts an adaptive system, and the adopted structure is a fully connected multi-layer feed-forward network with a single hidden layer. The fully connected multi-layer feedforward network includes an input layer, a hidden layer and an output layer. The hidden layer includes a plurality of neurons, and the output of the hidden layer is the input of the output layer. The number of layers and neurons per layer is a trade-off between simplicity, performance, and training time. Since the input layer ...
Embodiment 3
[0137] This embodiment provides a robot admittance compliance control system, such as Figure 6 As shown, the robot admittance compliance control system includes a detection module 31 and an admittance module 32;
[0138] The detection module 31 is used to detect the operating force applied to the robot, and detect the moving speed and acceleration of the robot;
[0139] The admittance module 32 is used to input the operating force, motion speed and acceleration into a trained neural network model, and the neural network model outputs admittance parameters, which include virtual damping and virtual mass.
[0140] The robot in this embodiment can be used in scenarios such as assisted medical treatment and art sculpture, and is especially suitable for assisted medical treatment. The embodiment of the present invention does not limit its specific application field. In addition, the robot should be understood in a broad sense, for example, the robot may be a mechanical arm capabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More