

Multiple scent seeking robots and dangerous gas leakage source positioning system and method for underground comprehensive pipe gallery
A technology for dangerous gas and comprehensive pipe gallery, which is applied to the analysis of gas mixtures, instruments, alarms, etc., and can solve the problems of inability to deal with emergencies, low composition and positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Below in conjunction with accompanying drawing, the present invention will be further described
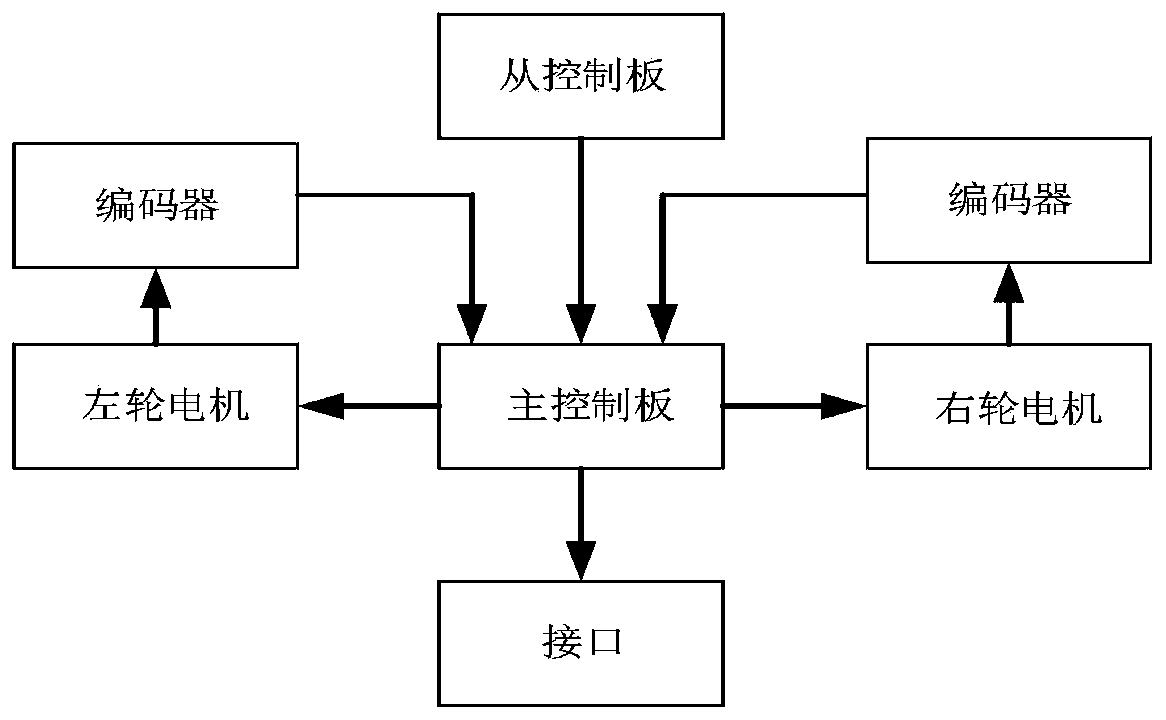
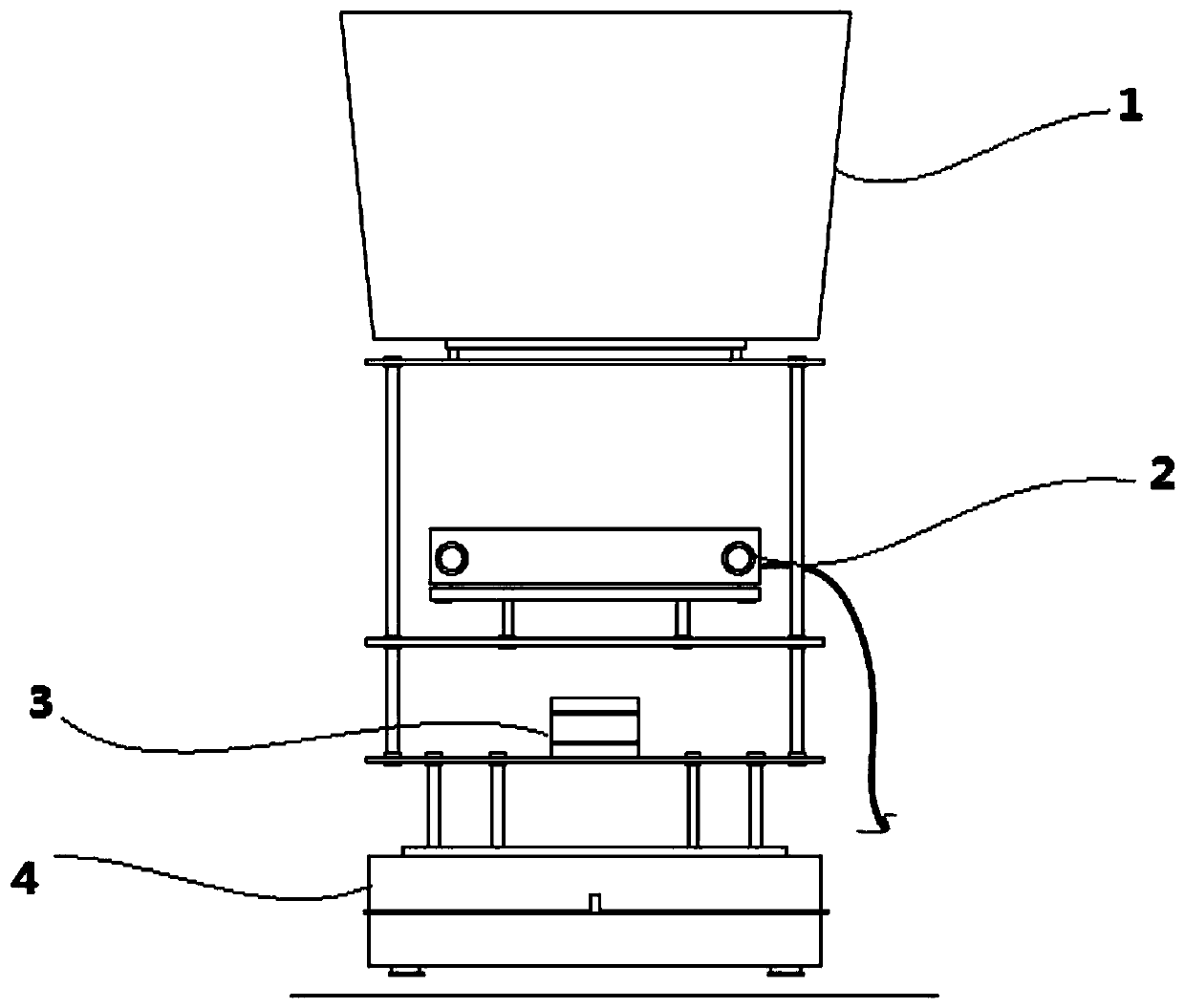
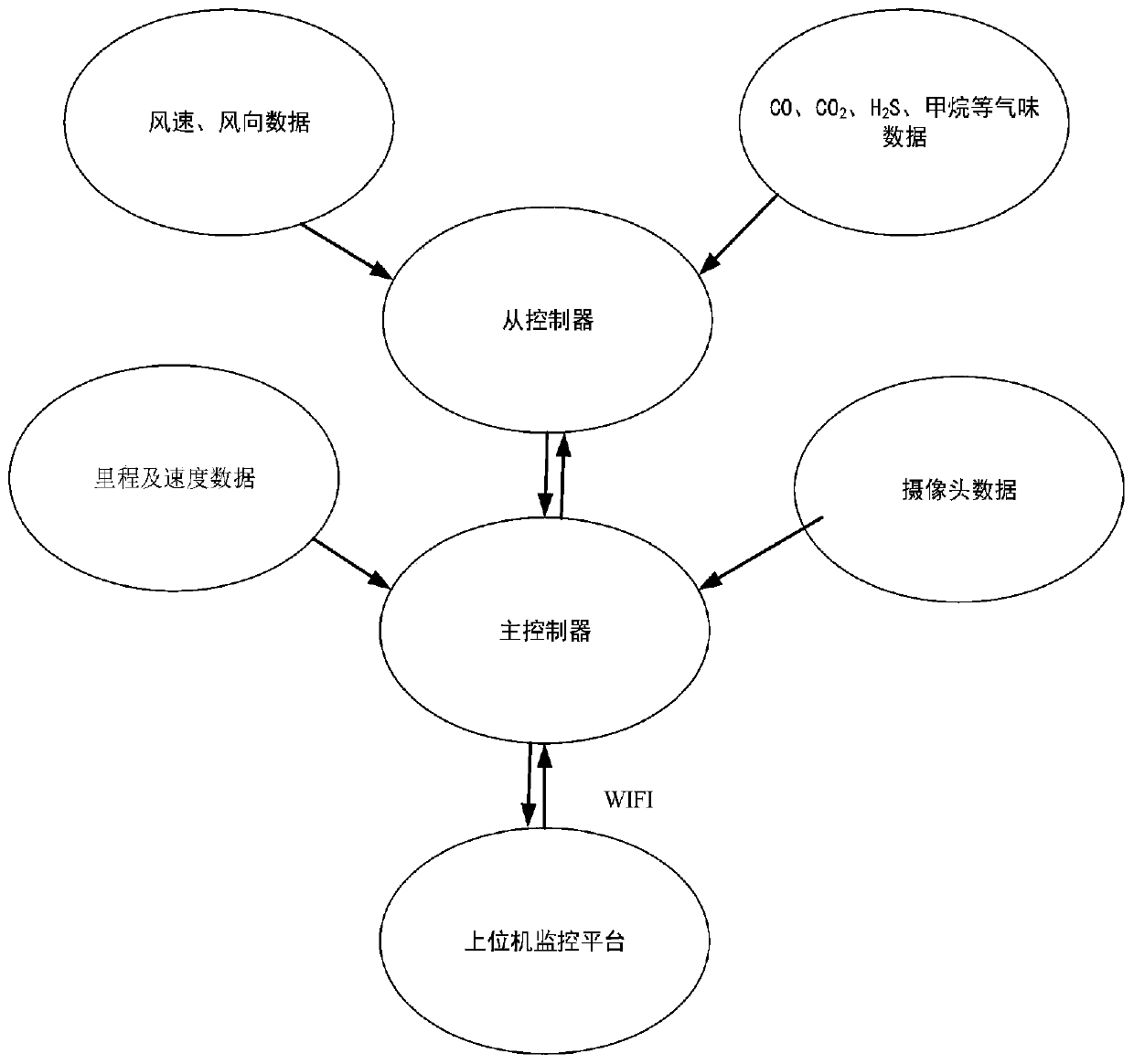
[0057] In order to solve the problems caused by the single sensor of the existing single mobile robot, this invention designs a taste-seeking robot to timely monitor the concentration of leaked gas through the gas sensor array and the camera, and timely collect the wind direction and wind speed through the wind speed sensor, and pass the RS-485 The serial bus standard is sent to the main control board through the Modbus protocol. The host controller judges the direction of the gas leakage source, the camera survey method, and the ultrasonic sensor detects the obstacle avoidance information to realize the automatic search for the optimal path. Finally, the main control board drives the DC motor to make the Xunwei robot move autonomously. The location of dangerous gas leakage sources is realized by multi-taste robot collaboration based on swarm intelligence optimization algor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More