

A Parameter Setting Method of the Speed Loop Active Disturbance Rejection Controller of Permanent Magnet Synchronous Motor
An active disturbance rejection controller and permanent magnet synchronous motor technology, applied in motor control, motor generator control, AC motor control, etc., can solve the problems of difficult parameters, low precision of system speed control, low responsiveness and stability, etc. , to achieve the effect of solving the difficulty of parameter tuning, improving the convergence speed and global optimization ability, and improving the speed control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
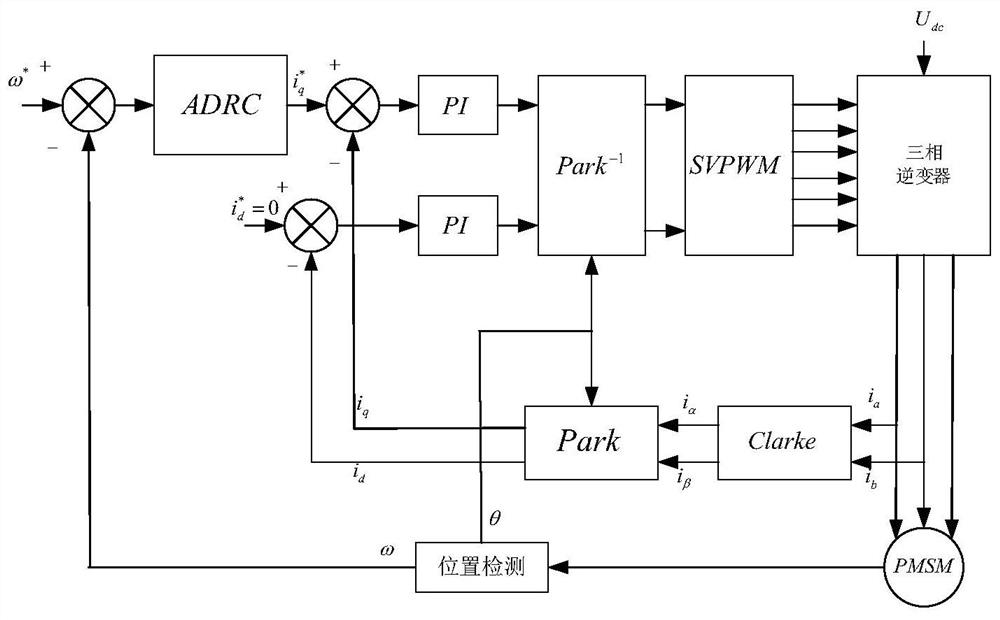
[0033] like figure 1 As shown, the embodiment of the present invention provides a permanent magnet synchronous motor speed loop ADR controller parameter tuning method is based on the speed outer loop and the current inner loop to construct a permanent magnet synchronous motor with a first-order ADR speed controller On the motor control closed-loop circuit, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More