

Planetary geared motor and joint robot capable of full closed-loop control
A planetary reducer, planetary deceleration technology, applied in the direction of controlling mechanical energy, program control manipulator, manipulator, etc., can solve the problem of unable to meet the requirements of normal use, transmission accuracy and torsional deformation of the reducer, backlash cannot be effectively detected and compensated, deceleration The problem of large assembly error of the machine and the drive motor, etc., achieves the effect of reducing the axial size, improving the accuracy, and avoiding the transmission error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Below in conjunction with embodiment the present invention is described in detail:
[0056] The planetary geared motor in the embodiment eliminates the backlash of the planetary geared motor, and designs a full-closed-loop control device that can improve the precision of the planetary geared motor. At the same time, the planetary geared motor is also larger than the existing planetary geared motor in terms of axial size. shortened.
[0057] When the above-mentioned high-precision planetary geared motor is applied to a joint robot, it can meet the use requirements of the joint robot.
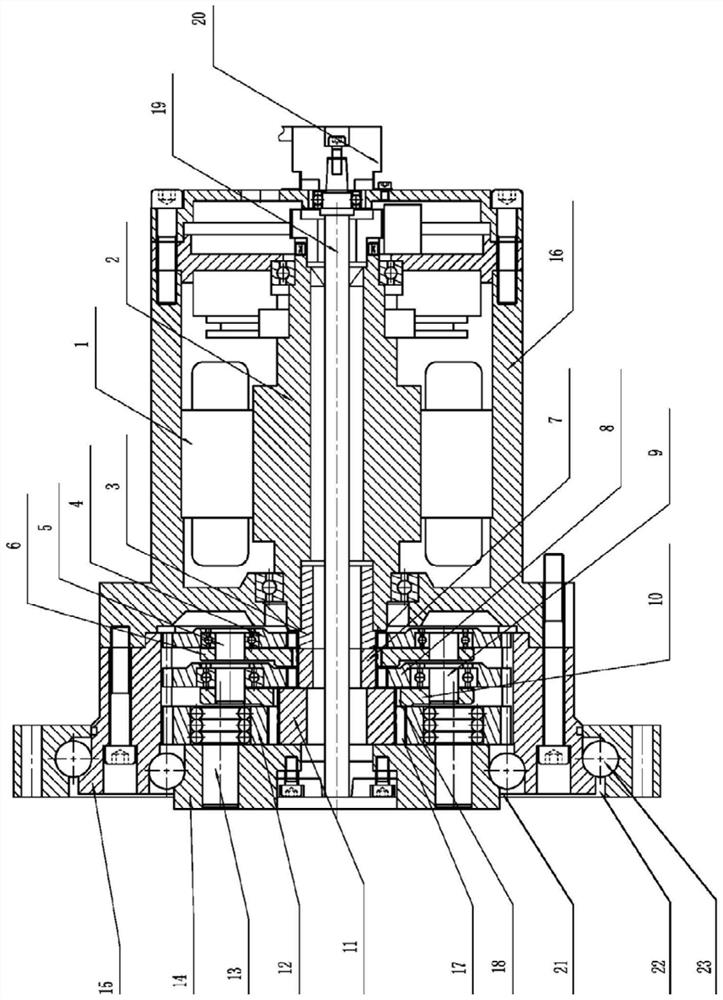
[0058] The basic structure of the planetary geared motor in the embodiment
[0059] Such as figure 1 As shown, the contact structure of the planetary gear motor includes a planetary gear part and a motor part, the motor part includes a motor housing 16, and a stator 1 and a rotor 2 arranged in the motor housing 16; the planetary gear part includes an internal gear Housing 15, the S-leve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More