

Positioning recovery method based on particle filter and robot equipment
A technology of particle filter and recovery method, which is applied in the field of robotics and navigation, can solve the problems of long time-consuming prior information, large global map, and low efficiency, and achieve the effects of improving robustness, improving efficiency, and reducing time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
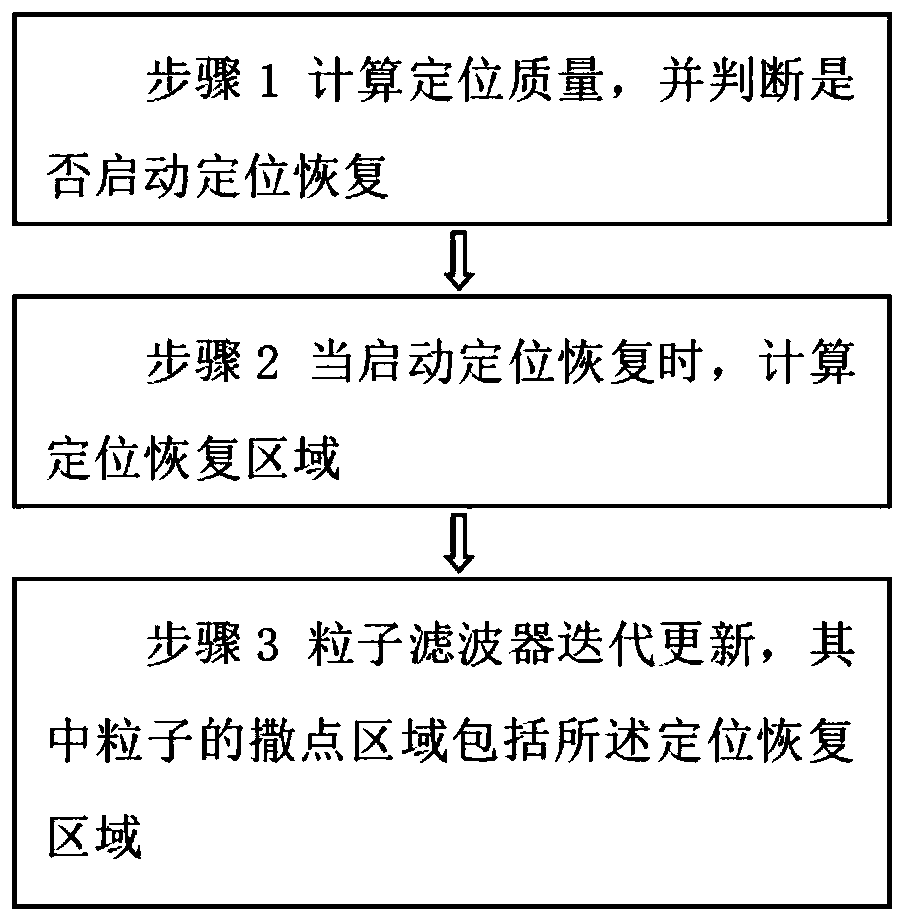
[0031] figure 2 It shows a flow chart of Embodiment 1 of a particle filter-based positioning recovery method of the present invention, including:
[0032] Step 1. Calculate the positioning quality, and determine whether to start positioning recovery.
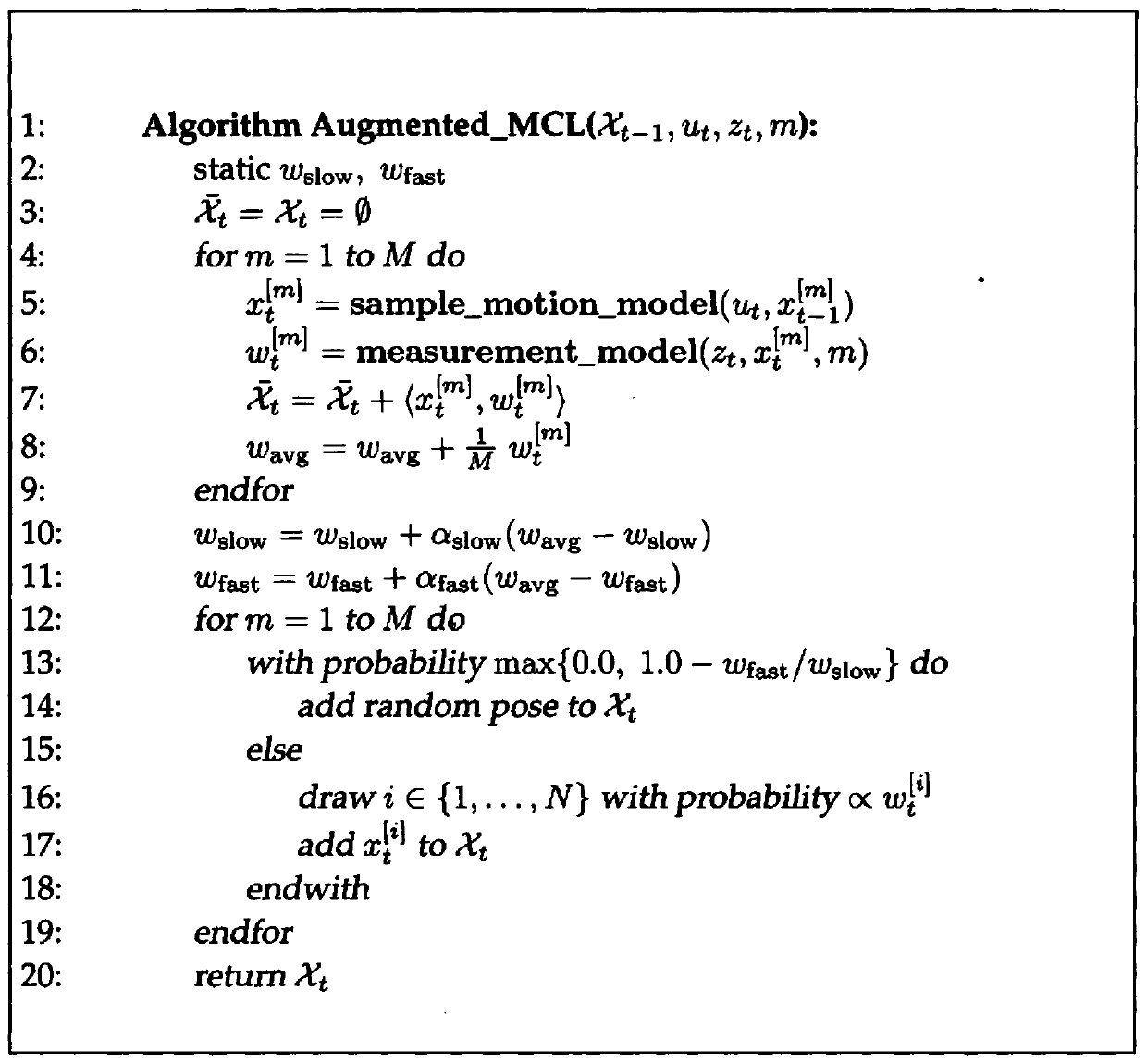
[0033] In specific implementation, there are many ways to represent the positioning quality, such as using the average weight of all particles, or the short-term likelihood average and long-term likelihood average of particles, and so on.
[0034] Taking the average weight of particles as an example, the average weight of particles is calculated, and when the average weight is less than the threshold for starting positioning recovery, positioning recovery is started. The smaller the average weight, the farther the particle is from the real position. Therefore, the easiest way is to start the positioning recovery operation when the average weight is less than a certain value (defined as the threshold for starting the positionin...
Embodiment 2
[0046] Embodiment 2 provides a robot device for positioning recovery based on a particle filter, including:
[0047] The positioning recovery judging module is used for calculating the positioning quality and judging whether to start the positioning recovery.
[0048] There are many ways to represent the positioning quality, such as using the average weight of all particles, or the short-term likelihood average and long-term likelihood average of particles, and so on.
[0049]Taking the average weight of particles as an example, the average weight of particles is calculated, and when the average weight is less than the threshold for starting positioning recovery, positioning recovery is started. The smaller the average weight, the farther the particle is from the real position. Therefore, the easiest way is to start the positioning recovery operation when the average weight is less than a certain value (defined as the threshold for starting the positioning recovery). The spec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More