

Guide wire and catheter operating device for interventional embolization
A technology of guide wire catheter and manipulation device, which is applied in the field of guide wire catheter manipulation device in interventional embolization surgery, which can solve problems such as complex mechanical structure, large equipment vibration, and equipment pollution, and achieve simple device design, small start and stop fluctuations, and improved accuracy. degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
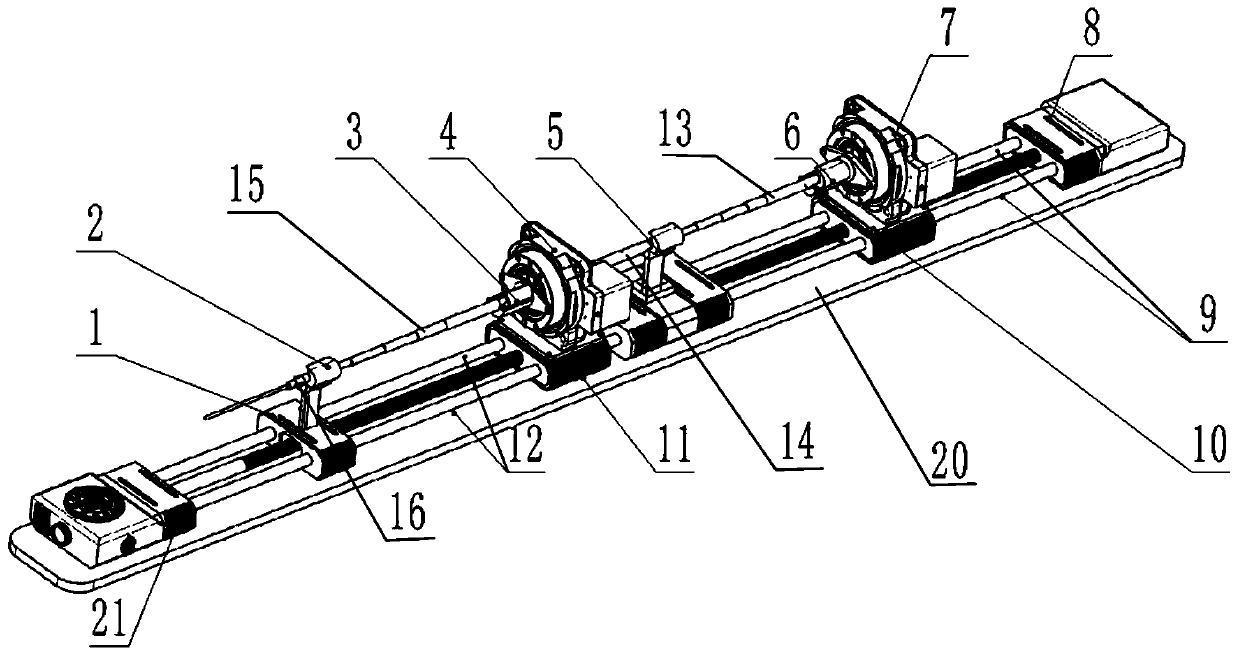
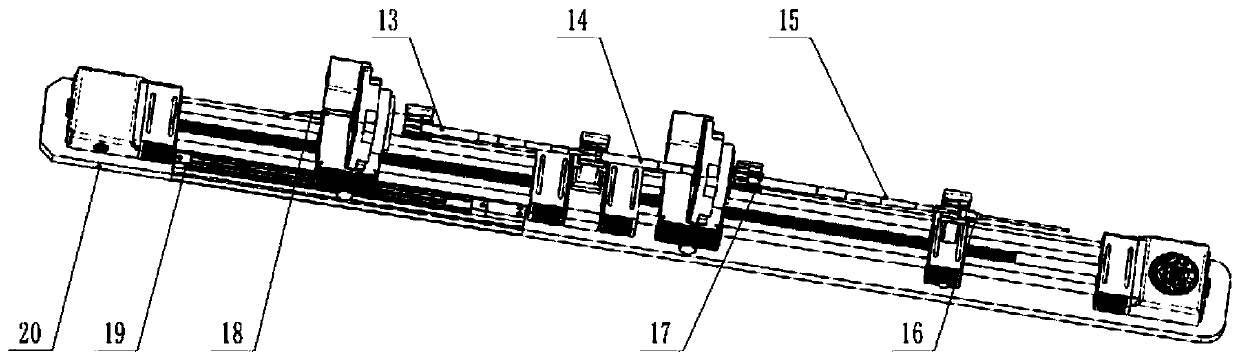
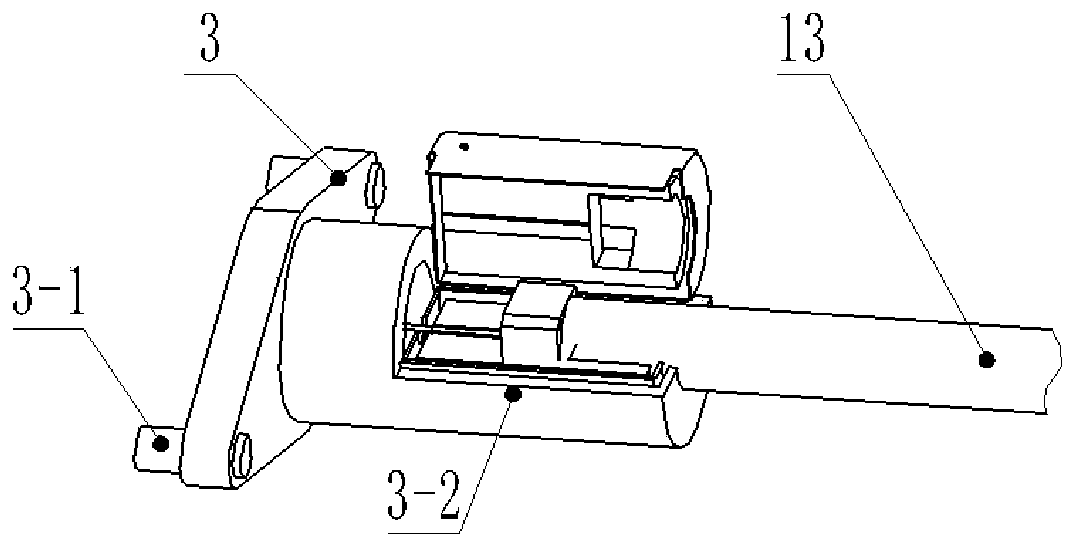
[0035] see Figure 1-9 , the embodiment of the present invention includes: a guide wire advancing and rotating module, a catheter advancing and rotating module, a guide wire force feedback module, a retractable catheter mechanism, a guide wire catheter locking mechanism, a movable imaging catheter locking mechanism, and control of the advancing module and The rotary module coordinates the job's control system.
[0036] The guide wire catheter manipulation device of the interventional embolization surgery robot described in the embodiment of the present invention is arranged on the fixed base plate 20 as a whole, and the bottom surface of the fixed base plate 20 has a through hole, which can be flange-connected with the follow-up mechanical arm for position adjustment of the actual surgical manipulation device. The upper part of the fixed bottom plate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More