

Stacking robot driving method and driving system
A technology for palletizing robots and driving methods, which is applied in the field of palletizing robot driving methods and driving systems, can solve problems such as low control accuracy, and achieve the effects of ensuring real-time performance, high cost performance, and good control flexibility characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
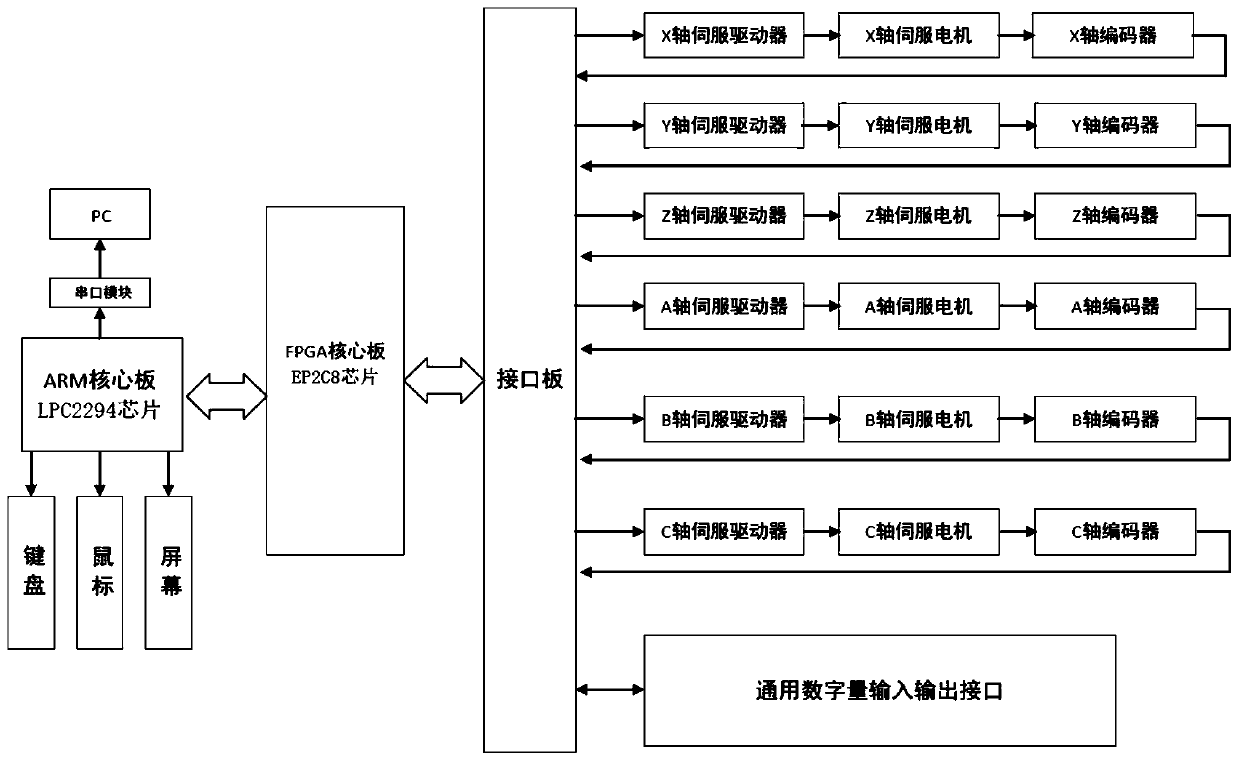
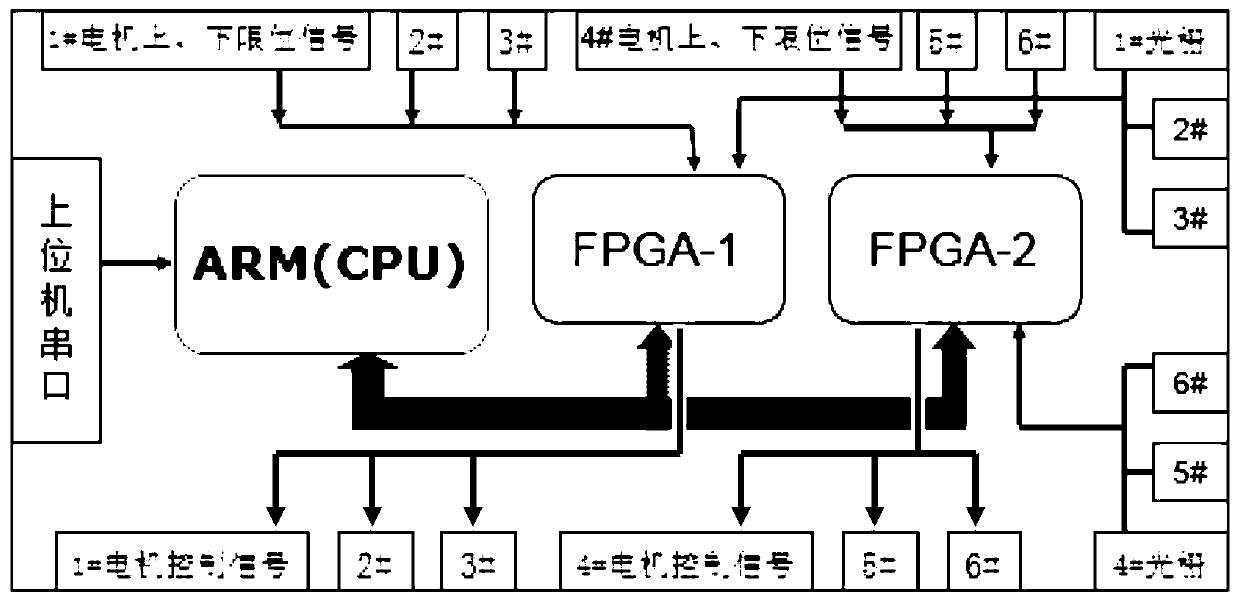
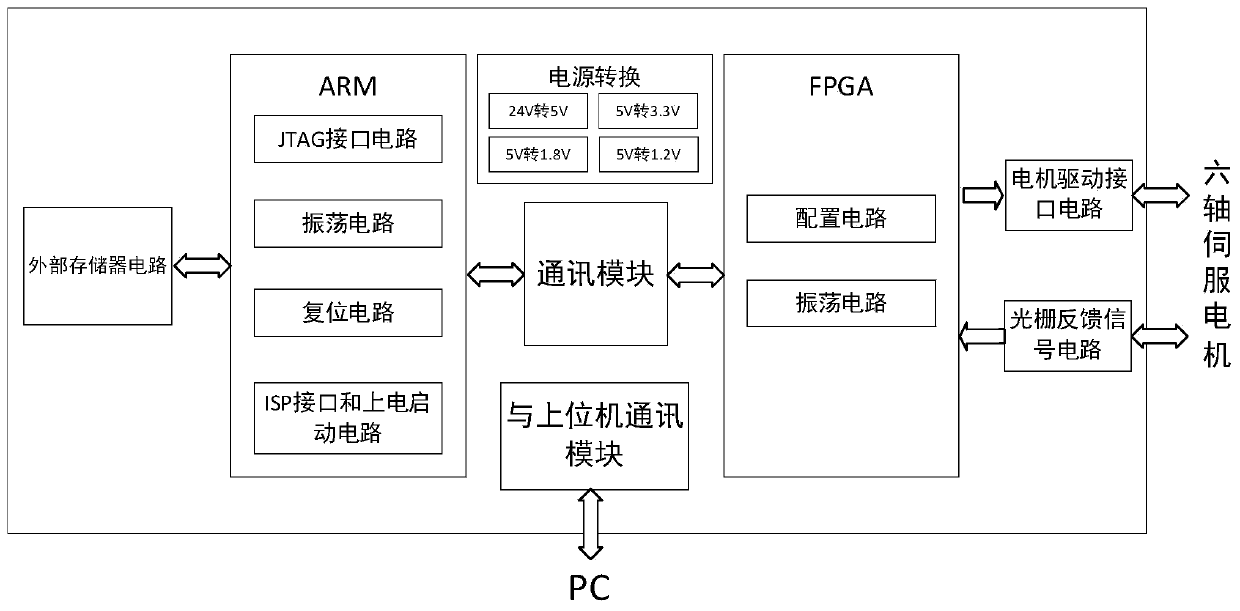
[0061] Such as figure 1As shown, the applicable stacking robot structure of the present invention: X, Y, Z, A, B, C six-axis stacking robot driver card based on Altera EP2C8 series FPGA chips and ARM7TDMI-S series LPC2294 chips, applied to cigarettes A robot for unpacking and palletizing cigarette boxes in the silk production line. ARM is responsible for command or data interaction with the host computer, FPGA is used for motor control signal transmission and grating signal processing, through motor signal control, grating closed-loop feedback signal processing, limit switch and other modules to realize the function of unpacking and stacking the cigarette box . In the palletizing robot based on this architecture, the ARM compiles the program dow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More