

Cusp form revolution object tool calibration method for industrial robot on the basis of crossed laser beam
The technology of an industrial robot and a calibration method is applied in the field of industrial robot cusp-type rotary tool calibration based on cross laser beams, which can solve the problems of difficult practical application, high cost, and complicated tool calibration operation, and achieve the reduction of installation requirements and, The effect of simplifying operation and improving calibration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
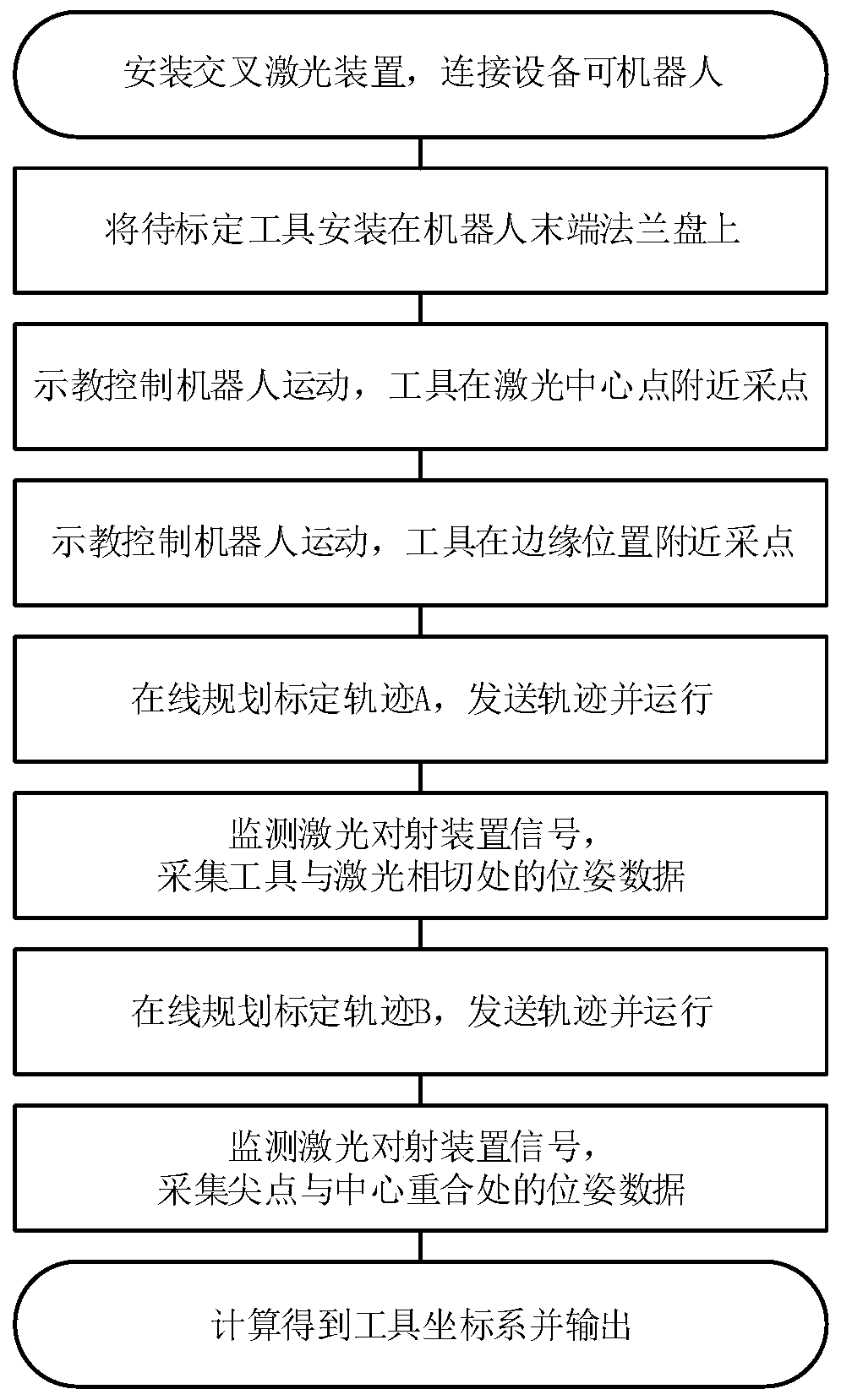
[0020] Embodiment 1: An automatic calibration method for a sharp-point rotary tool is provided, which includes the following steps:
[0021] (1) Install the cross laser shooting device in the working space of the robot, and connect the laser device and the robot motion control system through the calibration software.
[0022] (2) Clamp the tool to be calibrated at the end of the robot, control the movement of the robot so that the tool is near the center of the cross laser device and the edge of the measurement area of the cross laser beam device, and record the end pose of the robot flange through software; control The robot changes its posture, and then makes the tool near the center of the cross laser beam, records the current robot flange end posture, repeats 3 times, and takes data in four different postures.
[0023] (3) After obtaining the key data, the calibration software plans the arc trajectory online and sends the trajectory to the robot motion control system to ...
Embodiment 2
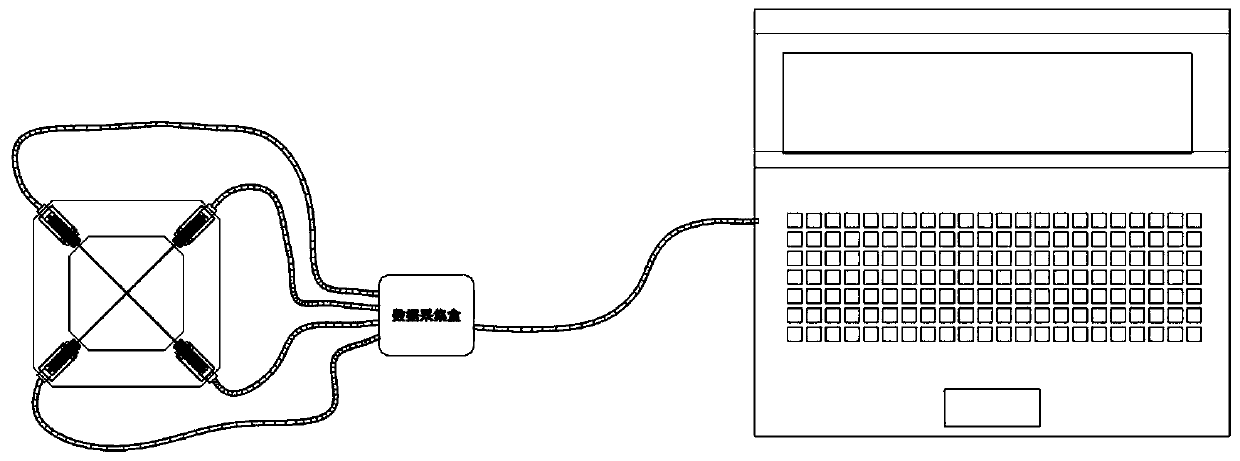
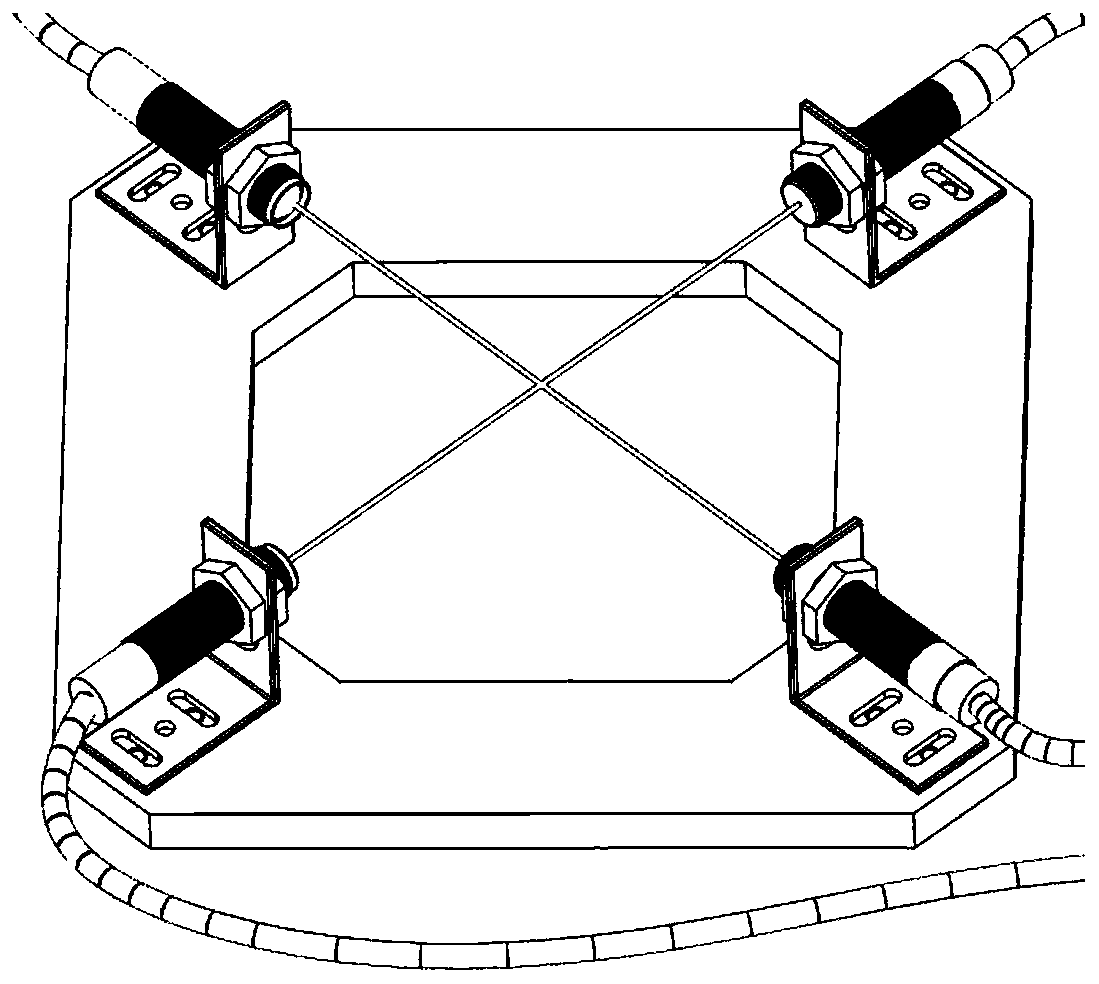
[0026] Embodiment two: figure 1 It shows the schematic diagram of the experimental connection of the cross-laser cross-firing device, which is mainly composed of three parts: 1. Cross-laser cross-firing device, 2. Data acquisition box, 3. PC-side software. figure 2 It shows the structure of the cross laser shooting device, which is mainly composed of two groups of laser shooting devices, each group includes a transmitting end and a receiving end, which are installed on the base through a right-angle bracket, so that the transmitting end and the receiving end are facing each other. The two laser beams are on the same plane and intersect at one point. . The inside of the data acquisition box is composed of two parts: 1. The power supply device, which provides a stable voltage for the laser shooting device. 2. AD conversion module, which converts the analog signal output by the laser shooting device into a digital signal and sends it to the software on the PC side.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More