

Automatic driving drivable area detection method and system and vehicle
A detection method and driving area technology, applied in the field of drivable area detection based on road images, can solve the problems of strong data dependence, slow detection speed, lack of cost, etc., and achieve the effect of improving the detection method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
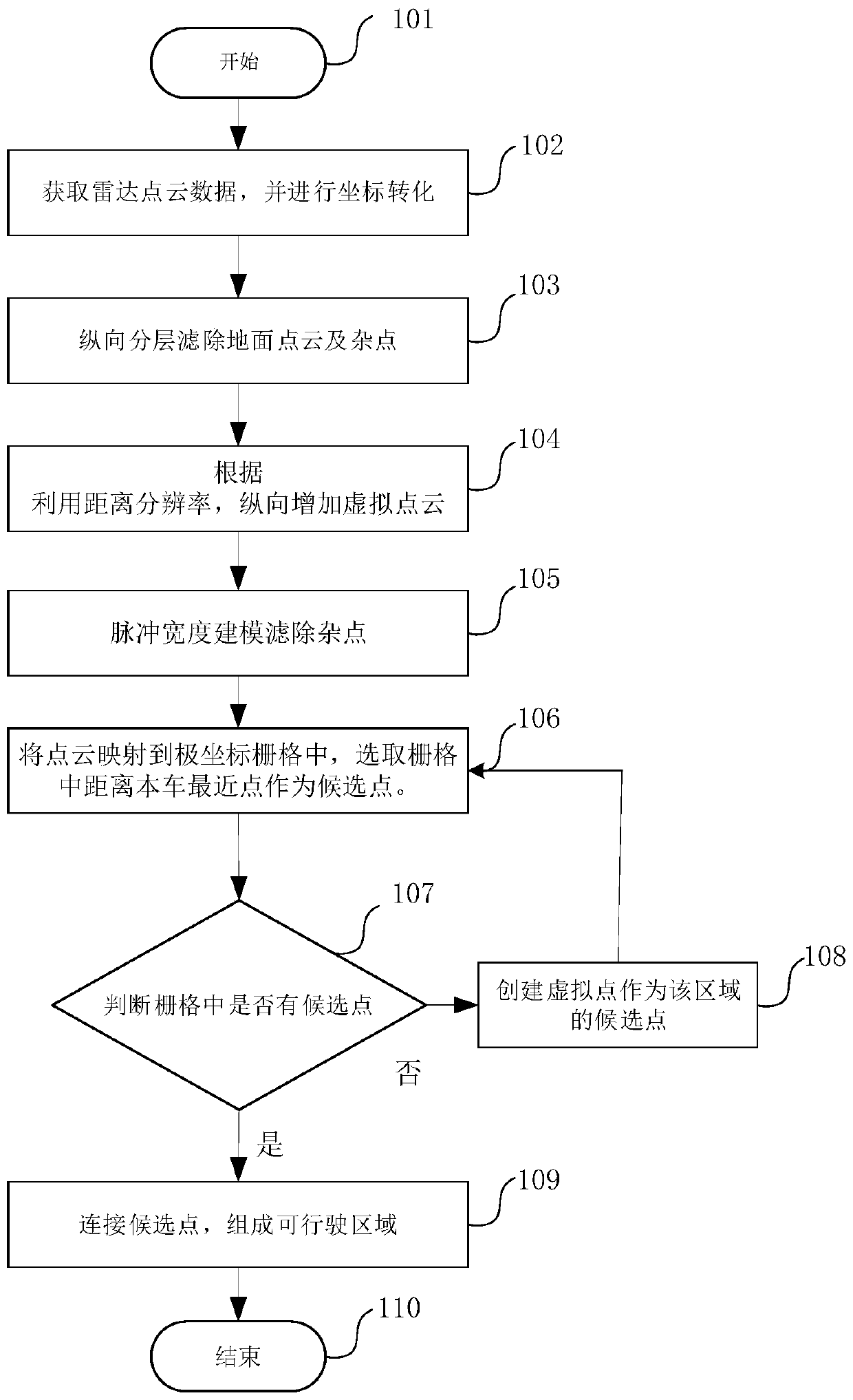
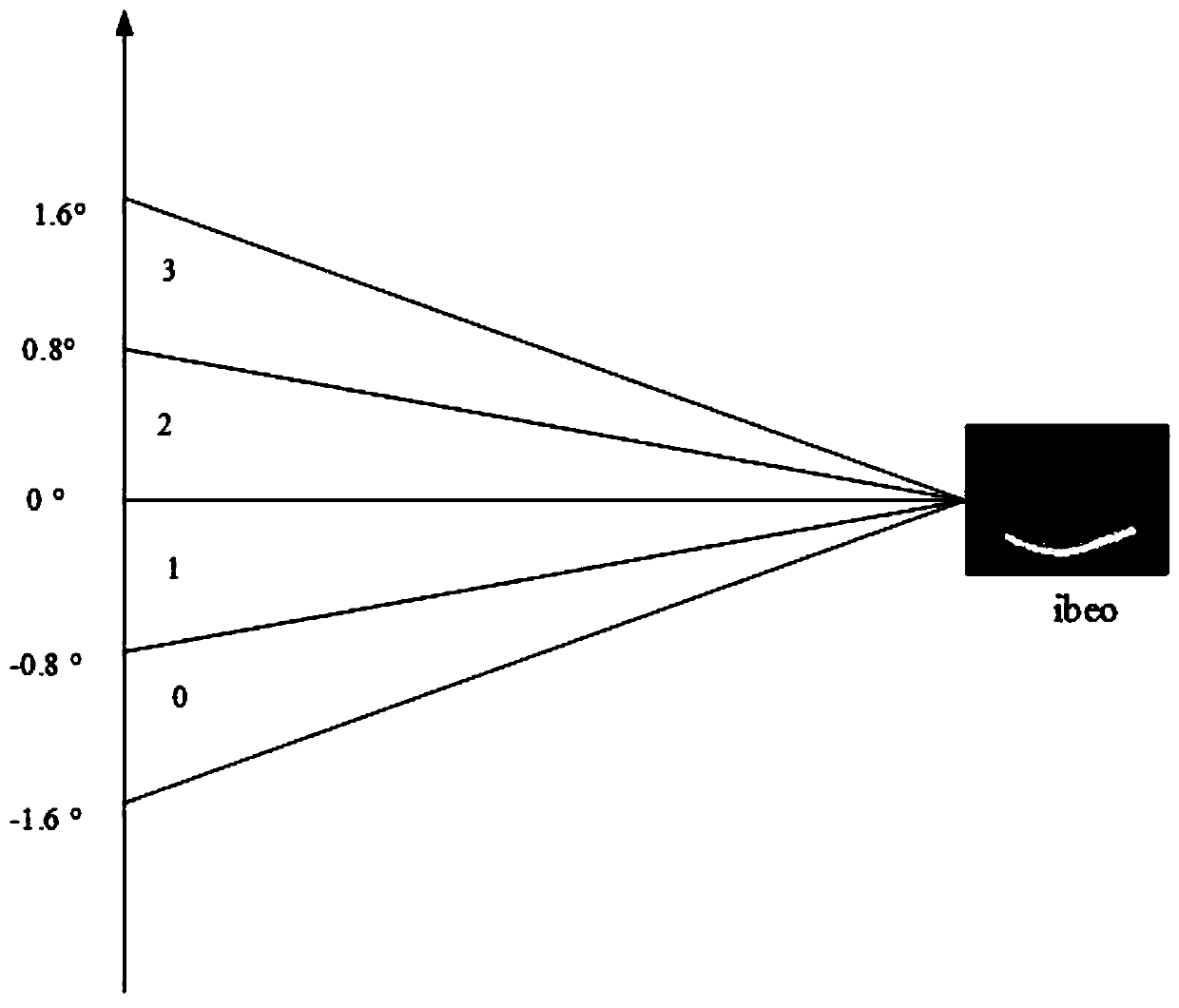
[0031] Combine below Figure 1-Figure 6 And the embodiments describe the present invention in further detail: the present invention is based on the data obtained by the laser radar sensor and is processed to obtain the required data:
[0032] The system equipment involved in the method includes: laser radar and computer. The lidar obtains environmental data from the Ethernet transmission processor for data processing, analyzes and obtains the original information of the point cloud, and transmits the original point cloud information to the drivable area for data processing, and maps the drivable area to the map module. The automatic driving system controls the driving of the vehicle according to the drivable area.
[0033] Such as figure 1 The flow chart of laser point cloud data processing is shown.
[0034] Step 101 starts the procedure.
[0035] Step 102 begins to obtain the original point cloud information through the laser radar, and performs coordinate transformation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More