

Laser radar three-dimensional point cloud segmentation method
A 3D point cloud and laser radar technology, applied in the field of computer vision, can solve problems such as unsatisfactory point cloud segmentation accuracy and over-segmentation of point cloud and point cloud, and achieve the goal of maintaining the invariance of geometric features, fast and accurate segmentation, and maintaining integrity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings.
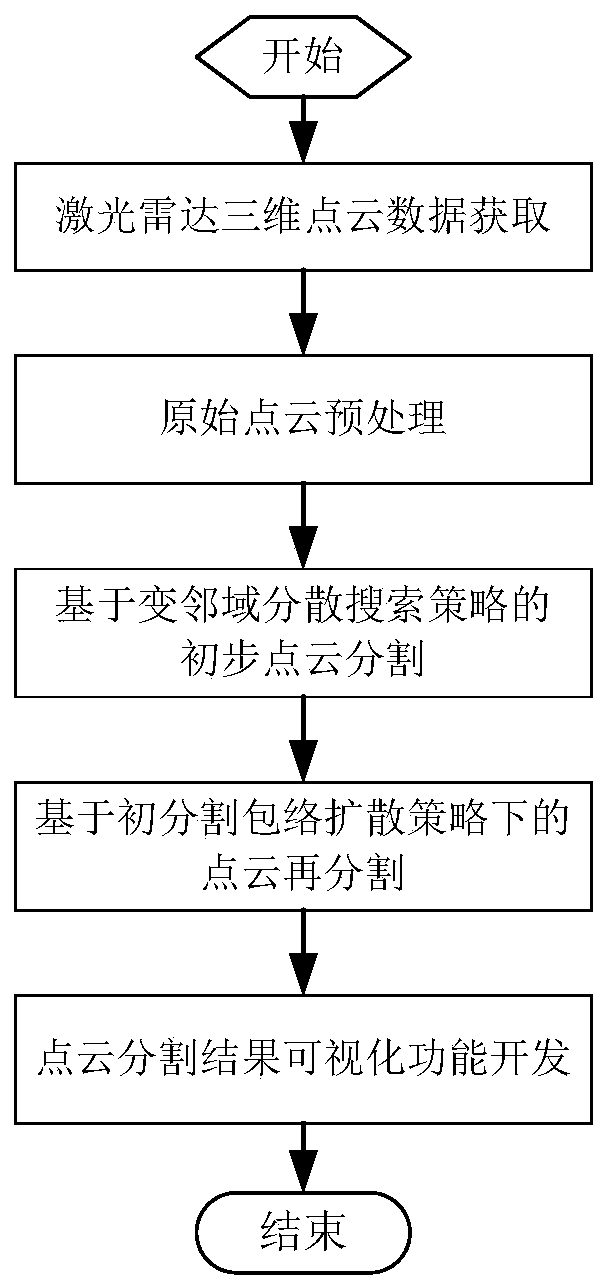
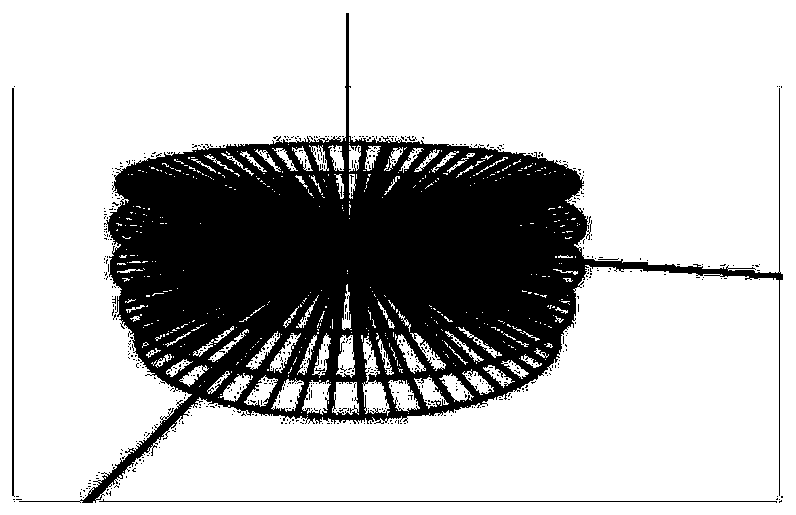
[0059] combine figure 1 , the laser radar 3D point cloud segmentation process of the present invention is shown in the figure below. First extract the original 3D point cloud data collected by 360-degree lidar, and then carry out the preprocessing of the original point cloud. The preprocessing process includes denoising, simplification and coordinate transformation of the original point cloud data, and constructs a 3D Cartesian coordinate system. The basic point cloud data, and store the three-dimensional data in the form of a two-dimensional array, and then adopt the variable neighborhood decentralized search strategy, and dynamically adjust the region growing method to carry out preliminary segmentation of the point cloud around the neighborhood range of the seed and the resolution of the search matching range Work, on this basis, design the point cloud segmentation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More