

Visual inertia odometer method based on IMU pre-integration
An odometer and pre-integration technology, applied in the field of visual-inertial odometer based on IMU pre-integration, can solve problems such as visual navigation influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
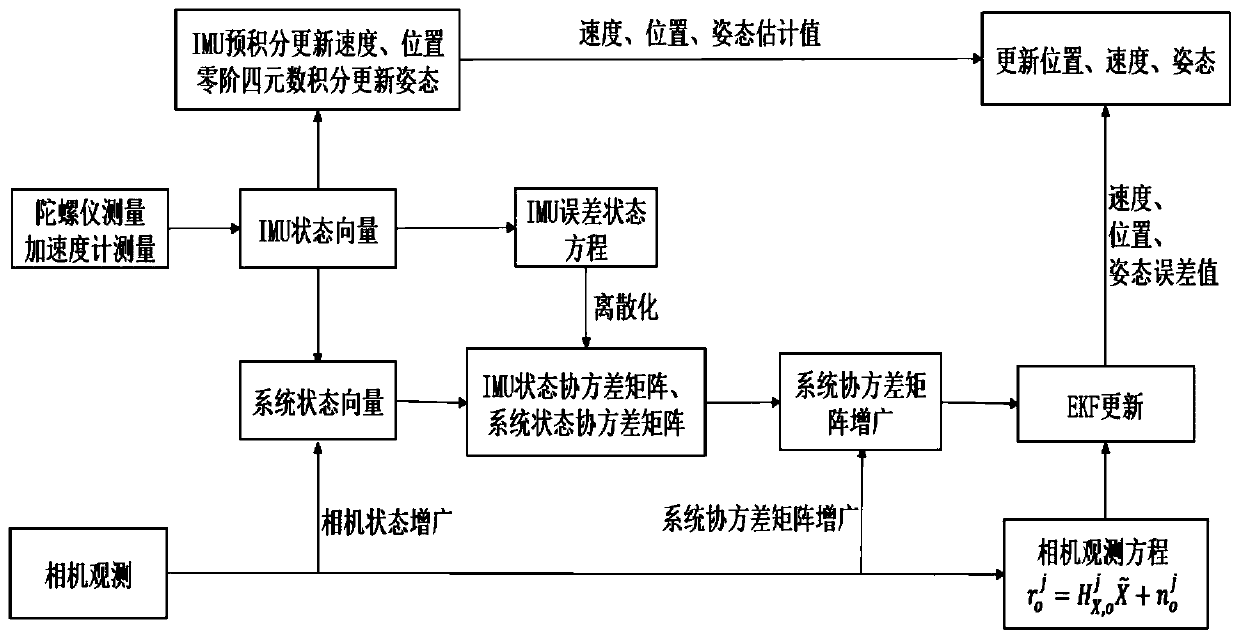
[0117] Such as figure 1 Shown, a kind of visual-inertial odometer method based on IMU pre-integration of the present invention comprises the following steps:
[0118] Step 1: Build a visual-inertial odometer system, define the reference coordinate system of the IMU fixed on the carrier as the I system; define the reference coordinate system of the camera fixed on the carrier as the C system; take the initial position of the camera as the origin of the world coordinate system , establish the world coordinate system for the XYZ axis on the upper right, that is, the G system; define the coordinate system of the carrier to coincide with the I system; collect camera sensor and IMU sensor data during the motion of the carrier;
[0119] Step 2: Construct system state vector and error vector, and establish IMU motion equation and error state equation;
[0120] Step 3: Construct the covariance matrix of the discretized system, and perform zero-order quaternion integration to calculate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More