

Robot motion control method based on electronic cam and control system
A robot motion, electronic cam technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of limited expansion function and development space, high cost, poor system openness, etc., to improve equipment stability and smoothness. , the effect of reducing equipment procurement and manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0037] Symbol annotation in the embodiment:
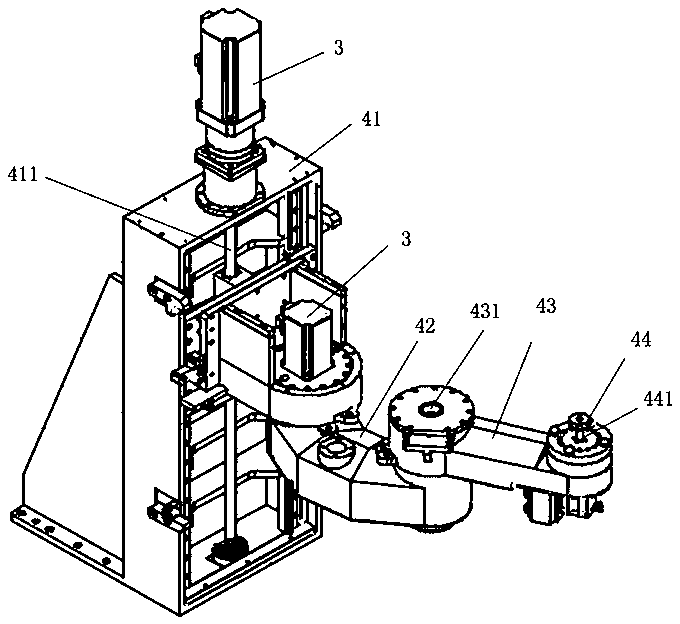
[0038] Z axis: linear joint axis X axis: shoulder joint axis
[0039] Y axis: Elbow joint axis A axis: Wrist joint axis.
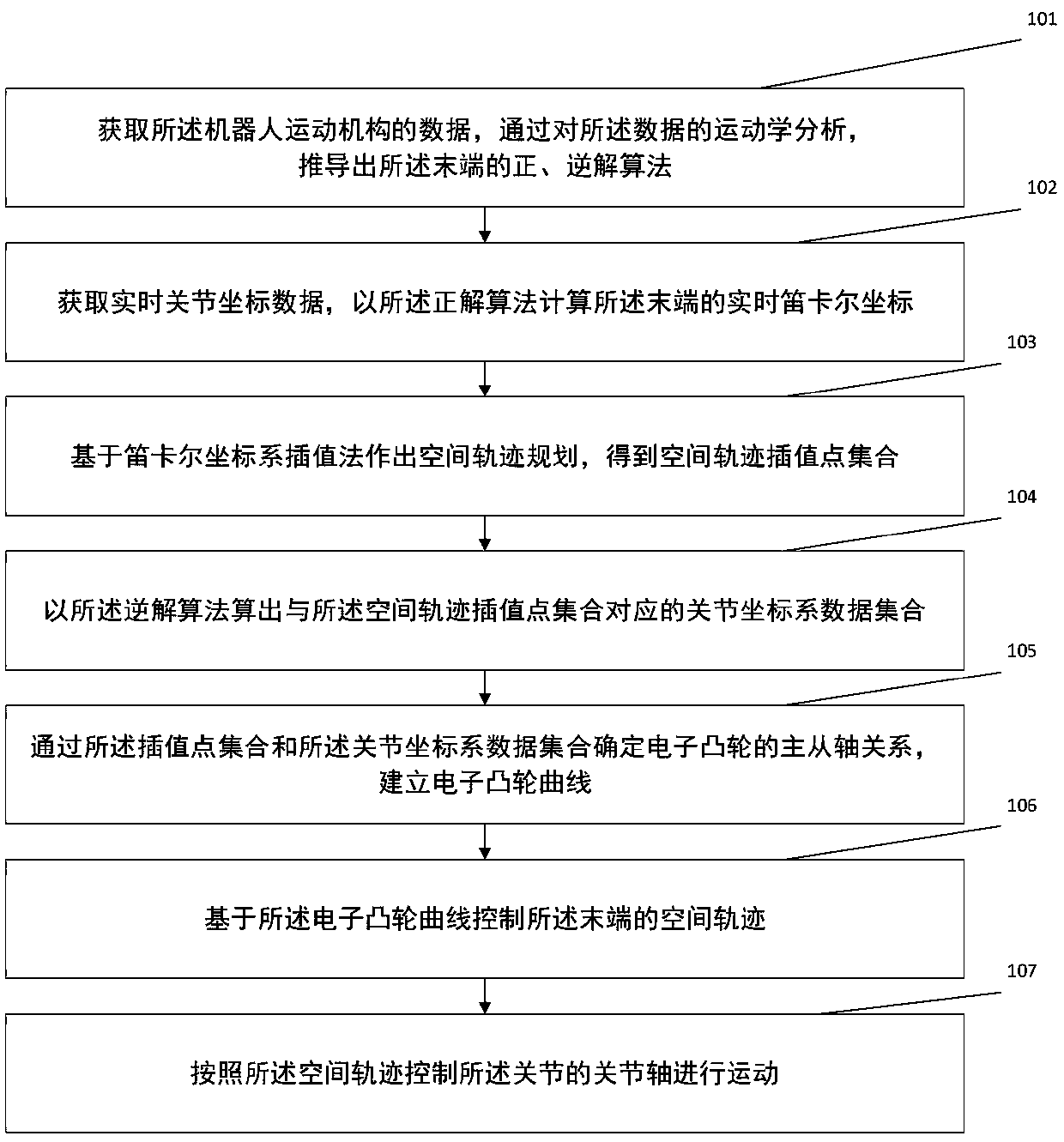
[0040] One aspect of the present invention provides a method for controlling the motion of a robot based on an electronic cam. The robot includes a kinematic mechanism, and the kinematic mechanism includes an end and a joint connected to the end, such as figure 1 As shown, the method includes:
[0041] Step 101: Obtain the data of the robot's kinematic mechanism, and deduce the forward solution algorithm and inverse solution algorithm of the terminal through kinematic analysis of the data;
[0042] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More