

Triboelectric three-dimensional flexible tactile sensor and sensing unit
A tactile sensor, three-dimensional flexible technology, applied in the field of sensors, can solve the problems of inability to realize static tactile force measurement, increase the complexity of processing circuits, and lack of self-power supply capability, etc., to achieve convenient array expansion, system redundancy, The effect of improving job stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with drawings and embodiments.
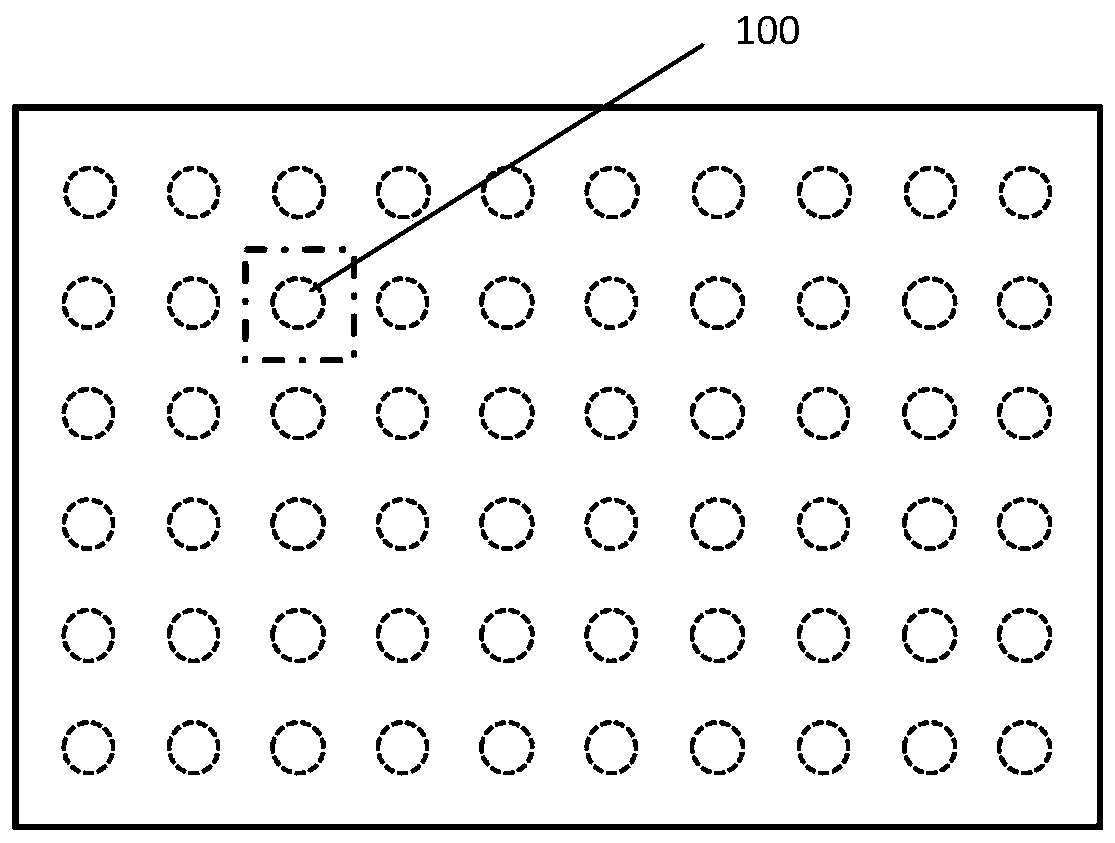
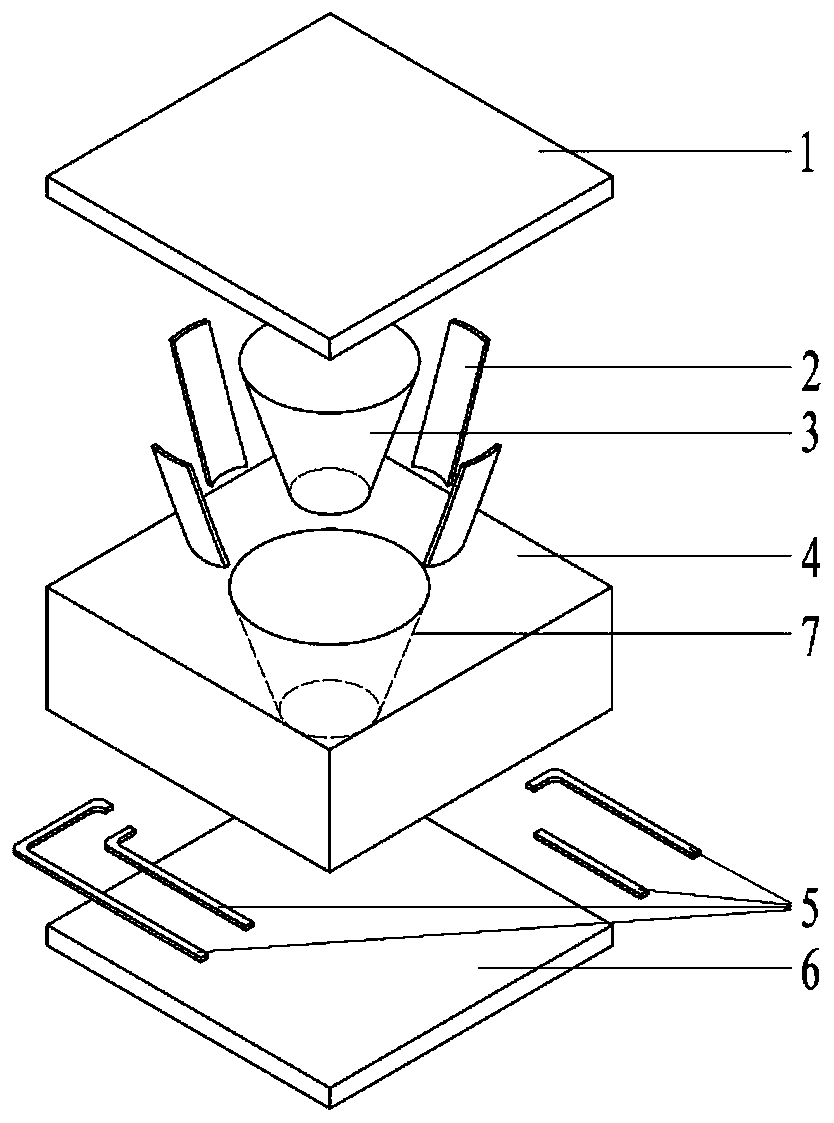
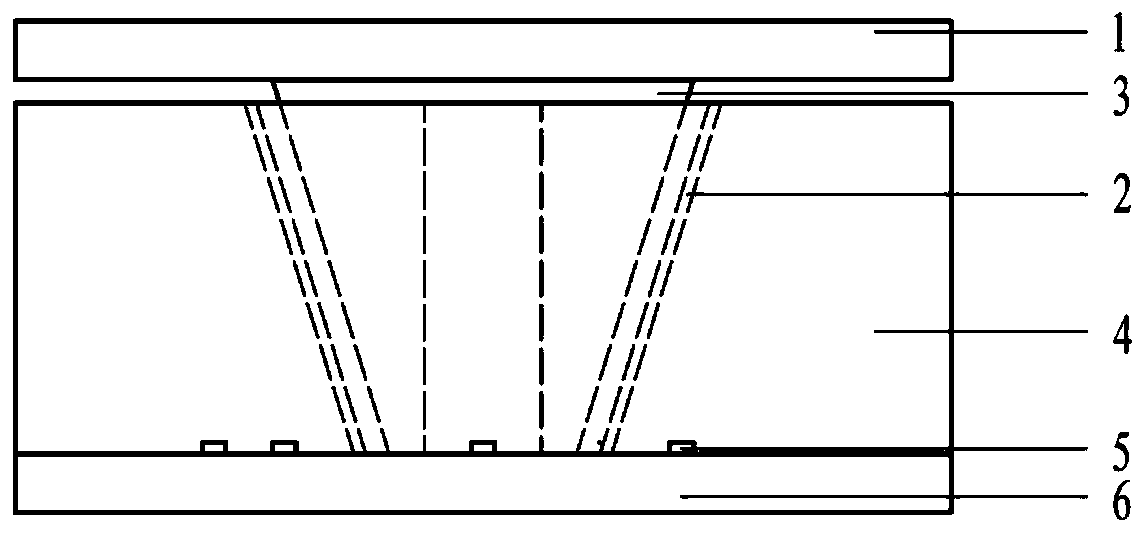
[0028] Such as figure 1 As shown, the present invention consists of arrayed triboelectric three-dimensional flexible tactile sensing units 100 . Such as figure 2 , image 3 As shown, the triboelectric three-dimensional flexible tactile sensing unit includes a flexible cover layer 1 , symmetrically arranged metal electrodes 2 , an insulating flexible rounded table 3 , a flexible middle layer 4 , leads 5 and a flexible bottom layer 6 from top to bottom.
[0029] Such as image 3 As shown, the top of the insulating flexible round table 3 is bonded to the flexible covering layer 1 , and the bottom is bonded to the flexible bottom layer 6 . The flexible middle layer 4 is provided with an accommodating cavity 7 in the shape of a rounded platform inner hole. The insulating flexible round table 3 is accommodated in the accommodation cavity 7 . The electrode 2 is located ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More