

Unmanned aerial vehicle pest detection method
A detection method, technology of pests, applied in the direction of neural learning methods, computer parts, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0054] The present invention will be described in detail below in conjunction with the drawings.
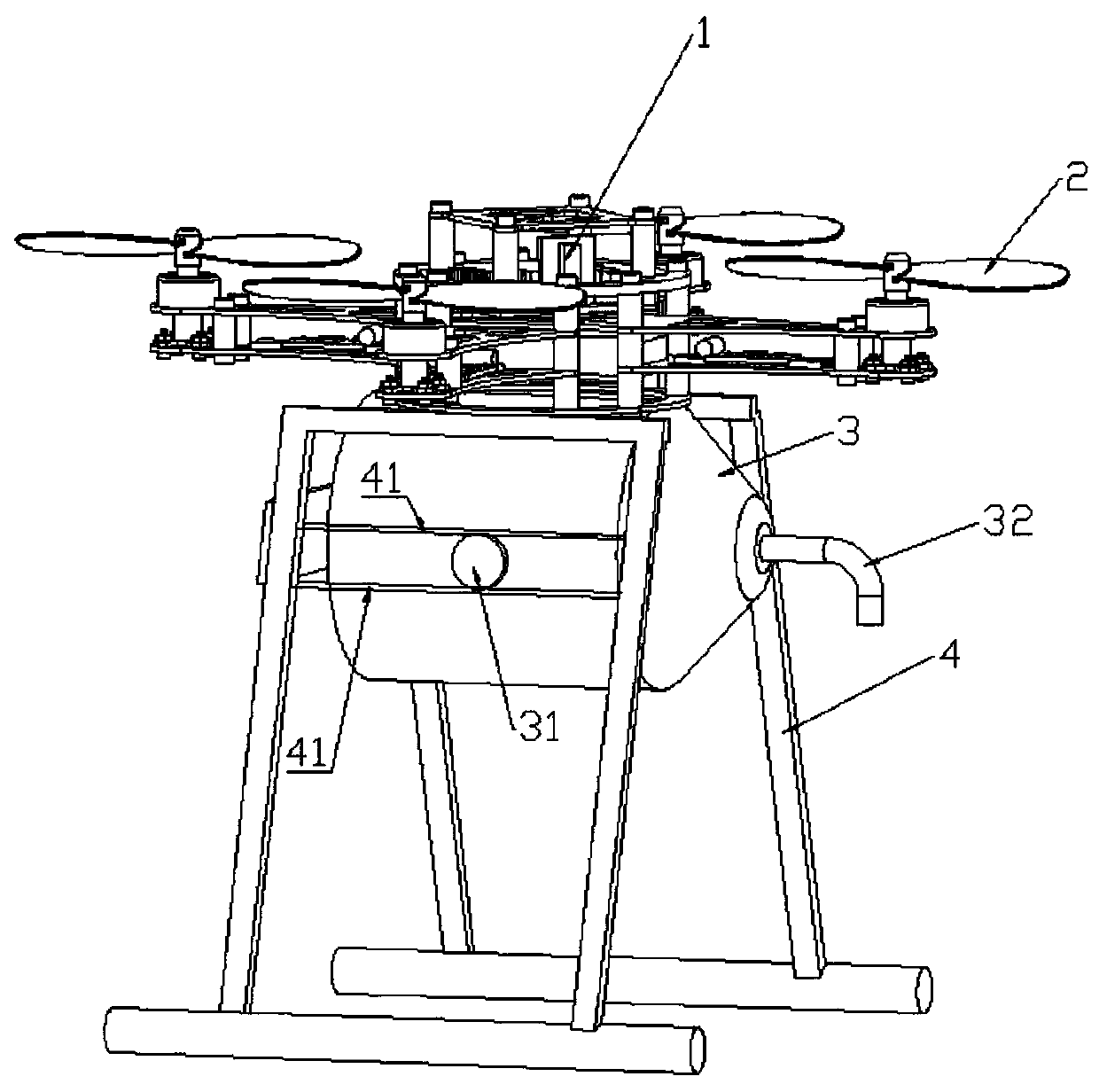
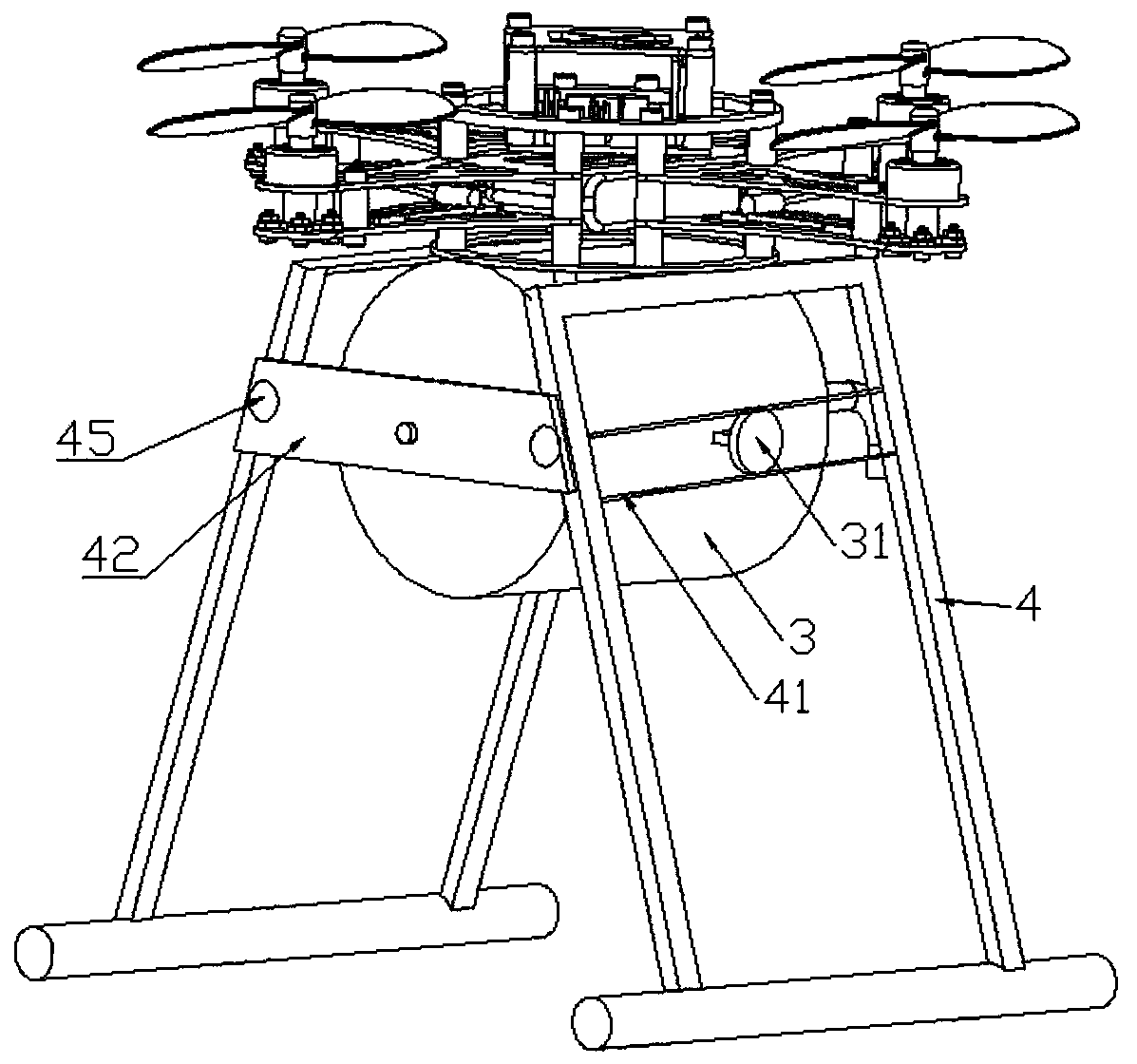
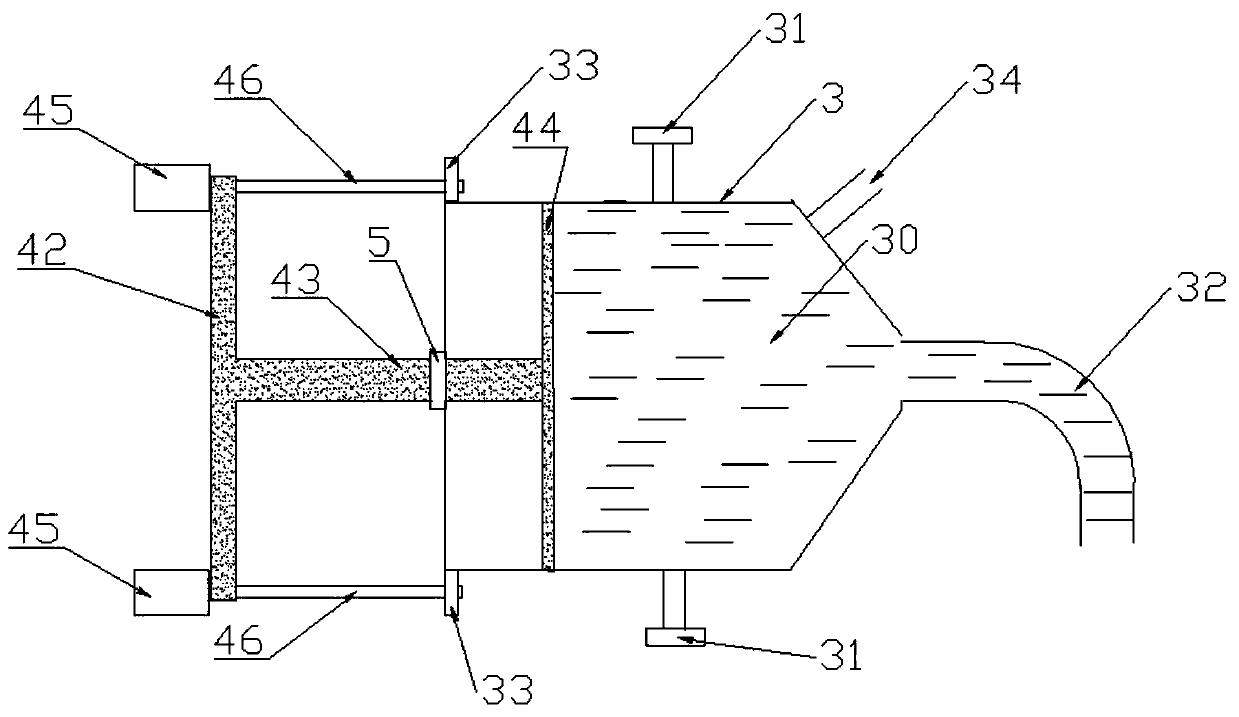
[0055] This embodiment discloses a pesticide spraying drone, which includes a body 1, a propeller 2 connected to the body 1, and a control device is provided on the body to control the operation of the drone. The propeller 2 rotates to provide the drone with Flight dynamics. The body of the existing unmanned aerial vehicle is connected with a medicine box. The medicine box is equipped with liquid medicine. The bottom of the medicine box is provided with a spout. The liquid medicine is sprayed from the spout due to the action of gravity or a pump. The liquid is easy to slosh, and with the consumption of the liquid, the spraying becomes thinner and the spraying is uneven. If a pump is used, on the one hand, the weight of the drone will be heavier and more electricity will be consumed. It is easy to block when spraying.
[0056] The body of the present invention is connected with a med...
Embodiment 2
[0063] Embodiment 2: This embodiment discloses a pest detection method. When the drone of the present invention sprays pesticides, the pest detection method determines the distribution of pests. The drone includes a pest detection system. When the system realizes its functions, the following methods are executed:
[0064] Obtain a video of the area to be detected, and the video is obtained by a camera that is not followed by a human;
[0065] Obtain the residual area based on the previous frame image and the next frame image of the current frame image in the pest video;
[0066] Fusing the residual area with the current frame image to obtain a fused current frame image;
[0067] High-pass filtering the fused current frame image to obtain a high-frequency current frame image;
[0068] Performing low-pass filtering on the fused current frame image to obtain a low-frequency current frame image;
[0069] Fusing the high-frequency current frame image and the low-frequency frame image to obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More