

Dynamic hip joint prosthesis control system
A control system and hip joint technology, applied in the direction of prosthesis, medical science, etc., can solve the problems of unable to provide power, no control system, etc., to achieve the effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
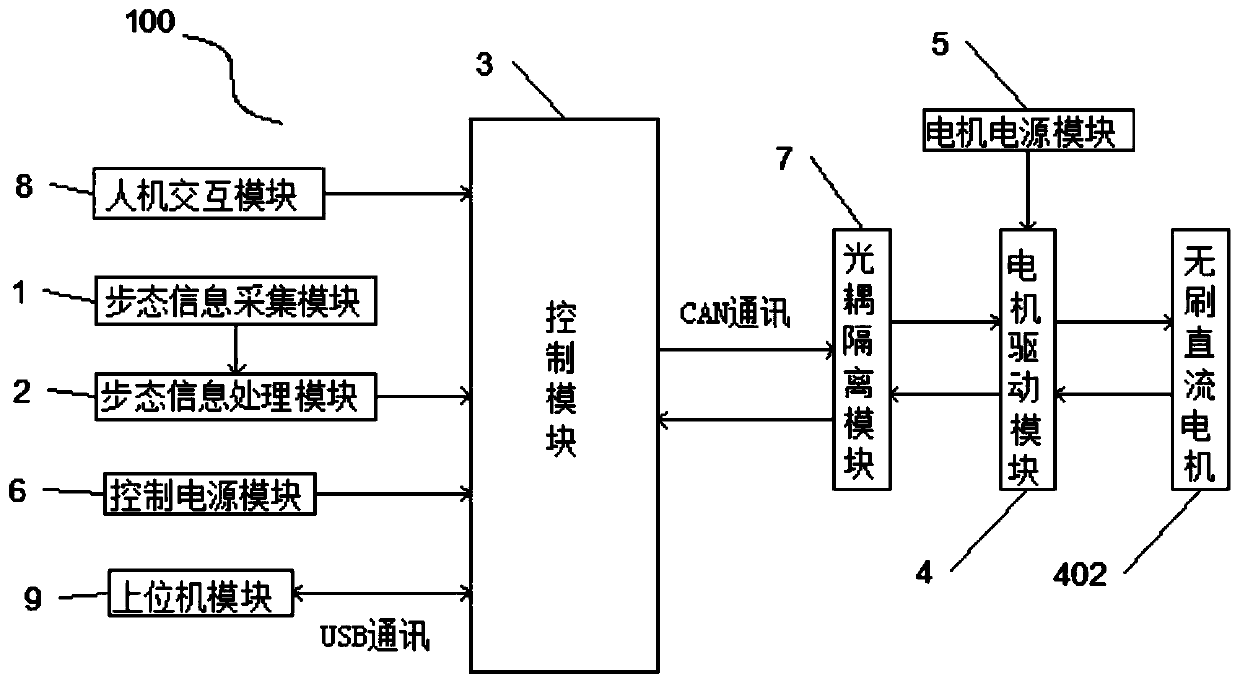
[0021] figure 1 It is a schematic diagram of the control system of the powered hip joint prosthesis in the embodiment of the present invention.
[0022] Such as figure 1 As shown, the present invention provides a powered hip joint prosthesis control system 100, which is used to control a powered hip joint prosthesis with a host computer to help high amputee patients walk, including: gait information acquisition module 1, gait information processing Module 2, control module 3, motor drive module 4, communication module (not shown in the figure), motor power supply module 5, control power supply module 6, optocoupler isolation module 7, Kalman filter module (not shown in the figure), man-machine Interactive module 8 and host...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More