

Three-dimensional point cloud outlier elimination method based on image segmentation
A 3D point cloud and image segmentation technology, applied in image analysis, 3D image processing, image enhancement and other directions, can solve problems such as large amount of calculation, a large number of manual interactions, application-dependent scenarios, etc., to solve the lack of semantics, reduce Computational amount, more realized effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
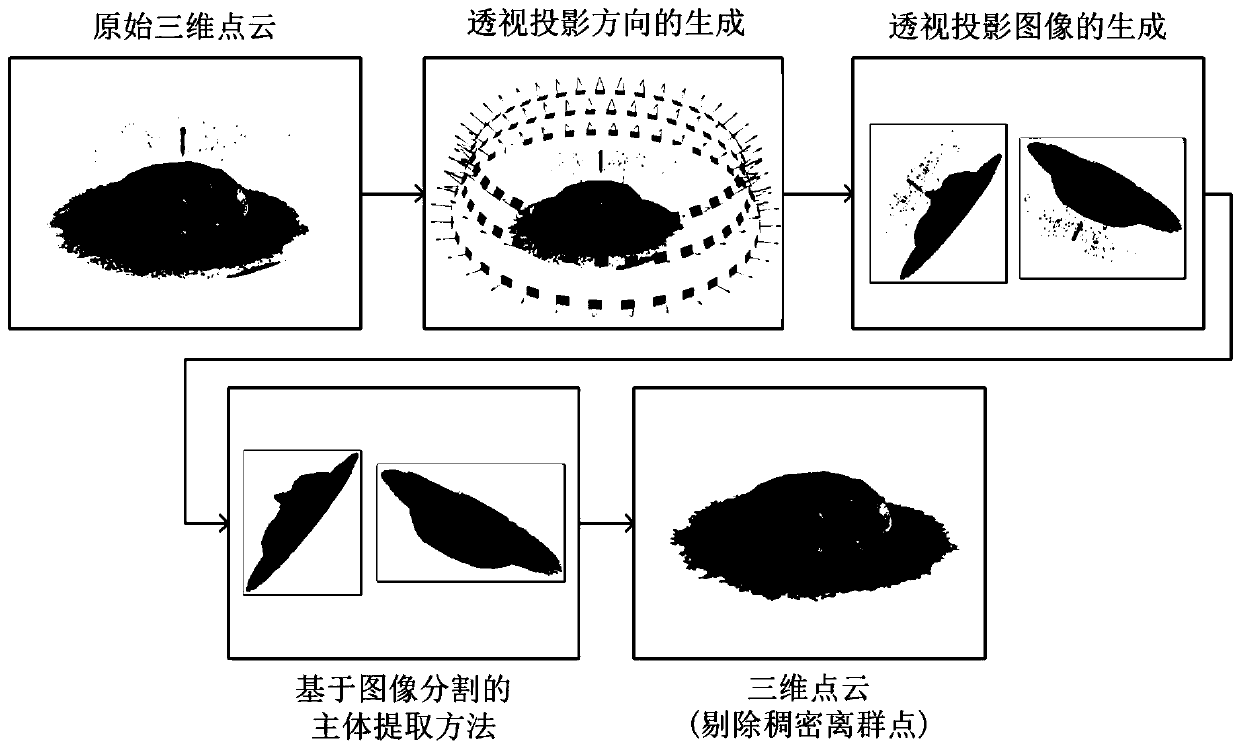
[0028] see figure 1 and Figure 8 , the method for removing outliers in the 3D point cloud based on image segmentation in the present embodiment comprises the following steps:
[0029] S1, the projection direction is generated by uniform sampling in the unit sphere parameter space. The spherical parameter equation used in the present invention is as follows:
[0030]
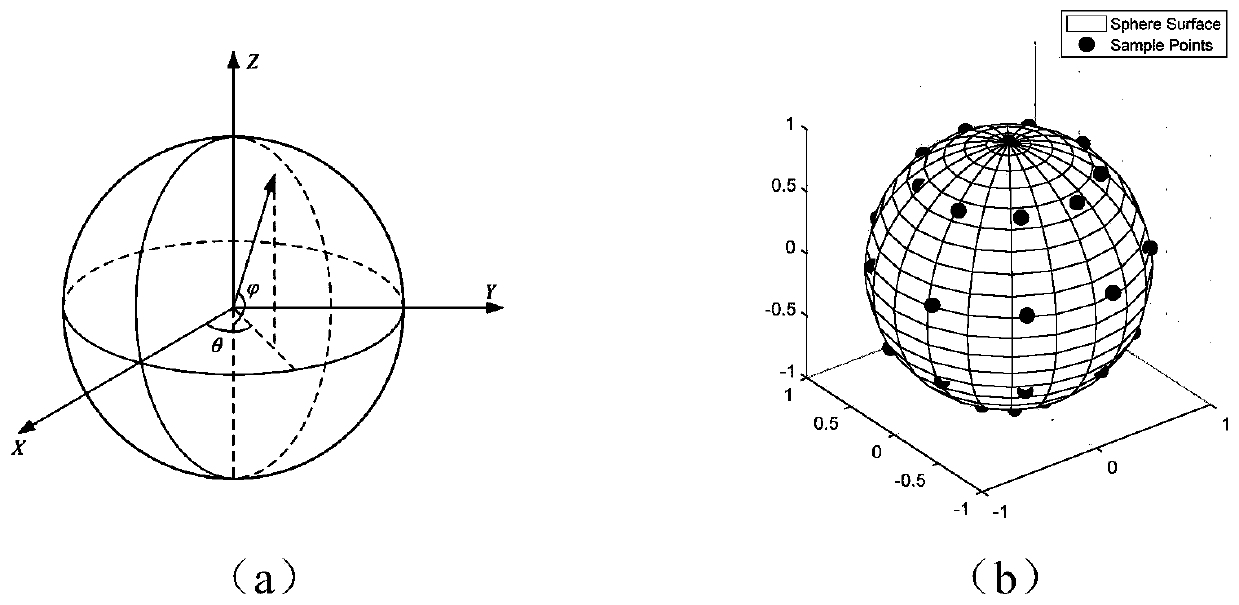
[0031] figure 2 (a) is a schematic diagram of spherical parameter coordinates used in the present invention, wherein θ is the clockwise angle between the positive direction of the X axis and the direction of the data point position vector, and It is the angle formed by the negative direction of the Z axis and the position vector of the data point. figure 2 (b) In order to select the sampling interval as Δθ=π / 5, The distribution map of the sampling points obtained, and the position vectors corresponding to these sampling points can be used as the projection direction of the perspective projection.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More