

Route planning method for robot assisted fracture reduction
A robot-assisted and path planning technology, applied in the field of robotics, can solve problems such as insufficient precision and safety, angular rotation deviation, displacement deviation, etc., and achieve the effect of simple method, short time consumption, and improved accuracy and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] The present invention will be further described below in combination with specific embodiments and accompanying drawings.
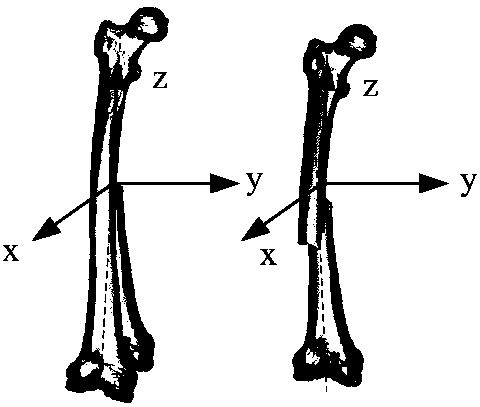
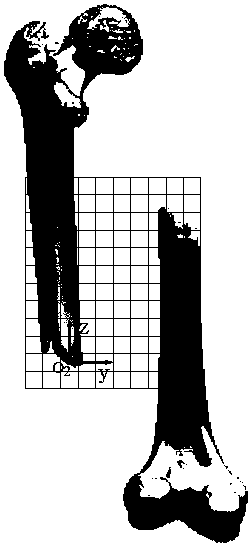
[0058] An example is a patient with a femur fracture. Reasonably arrange the operating table, reset robot, fracture model, NDI optical tracking system, etc. The two optical tracking arrays of the NDI optical tracking system were respectively fixed at the proximal and distal ends of the fracture to test the spatial position and posture of the proximal and distal ends of the fracture. Adjust the reference coordinate system of the NDI positioning system, adjust the initial pose of the reset robot, and prepare for the reset operation.
[0059] In this embodiment, a path planning method for robot-assisted fracture reduction surgery includes the following steps:
[0060] 1) For closed reduction of long bone fractures, when the robot-assisted fracture reduction operation is performed, the proximal end of the fracture is fixed, and the robot assists in a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More