

Modular robot joint integrating driving and detecting functions
A robotic joint, modular technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
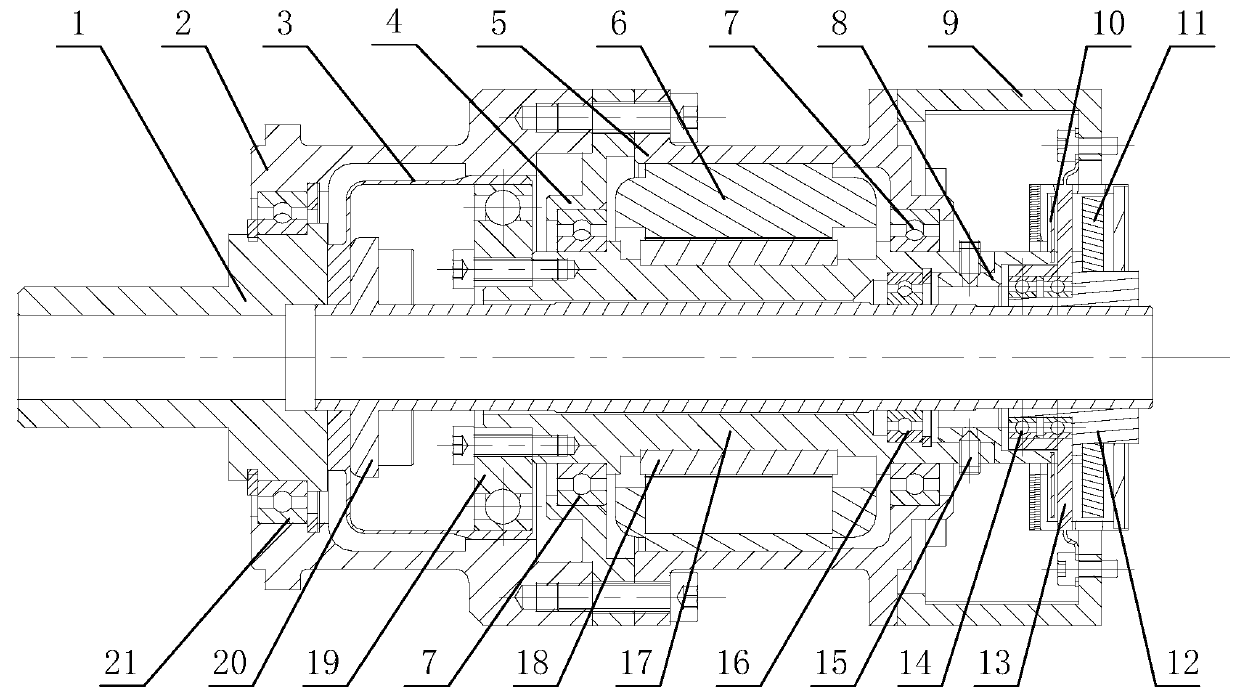
[0019] Example: see attached figure 1 and 2 , a modular robot joint integrating drive and detection functions, including a reducer assembly that adopts harmonic drive deceleration, a motor assembly, an encoder assembly, and a reducer return shaft 20, wherein the reducer assembly is installed on the motor assembly At the left end, the encoder assembly is installed on the right end of the motor assembly, which is characterized in that: the motor assembly includes a motor stator 6, a motor rotor 18, a motor bearing 7, a motor seat end cover 4, a motor housing 5 and a motor shaft set as a hollow structure 17. The motor casing 5 is set as a cavity structure, and the left and right ends of the motor casing 5 are provided with openings. The left opening end of the motor casing 5 is fixedly covered with a motor seat end cover 4, and the motor casing 5. The motor stator 6 is fixedly installed in the inner cavity. The motor rotor 18 fixedly sleeved on the motor shaft 17 is arranged in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More