

Man-machine collaboration tool delivery system and method based on teaching learning
A human-machine collaboration and tool technology, applied in the field of artificial intelligence and robot control, can solve problems such as poor stability and poor adaptability, and achieve the effect of easy transplantation, good versatility, and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] The human-machine collaboration tool delivery system provided by the present invention will be described in detail below in conjunction with the accompanying drawings, which is an explanation of the present invention rather than a limitation.
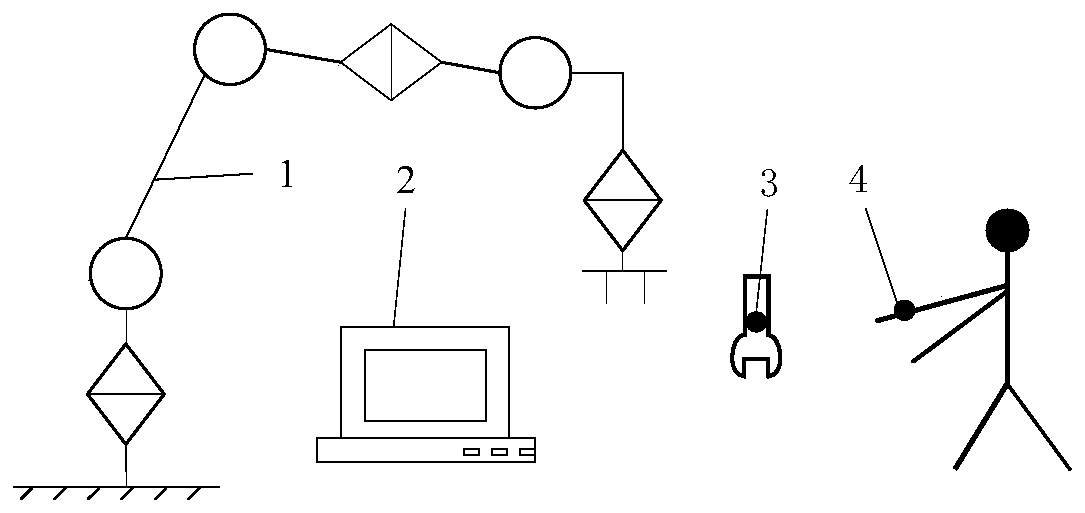
[0045] The present invention is a human-machine collaborative tool delivery system based on teaching and learning, and the equipment used is such as figure 1 As shown, it includes a robotic arm 1, a PC host computer 2, and motion capture points 3 and 4. The robotic arm 1 is a multi-axis robotic arm with control functions, and the PC host computer 2 communicates with the robotic arm 1 and the motion capture system. , during operation, the mechanical arm 1 moves to the mocap point 3 where the tool is located to grab the tool under the command of the PC host computer 2, and then moves to the motion capture point 4 where the hands are located to complete the tool submission. The PC host computer 2 builds The control system is based o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More