

AUV underwater recovery docking system based on multi-acoustic-beacon guidance
An underwater recovery and acoustic technology, which is used in satellite radio beacon positioning systems, underwater ships, underwater operation equipment, etc., can solve the problems of reducing anti-interference, cumbersome use, and complicated and cumbersome early layout.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
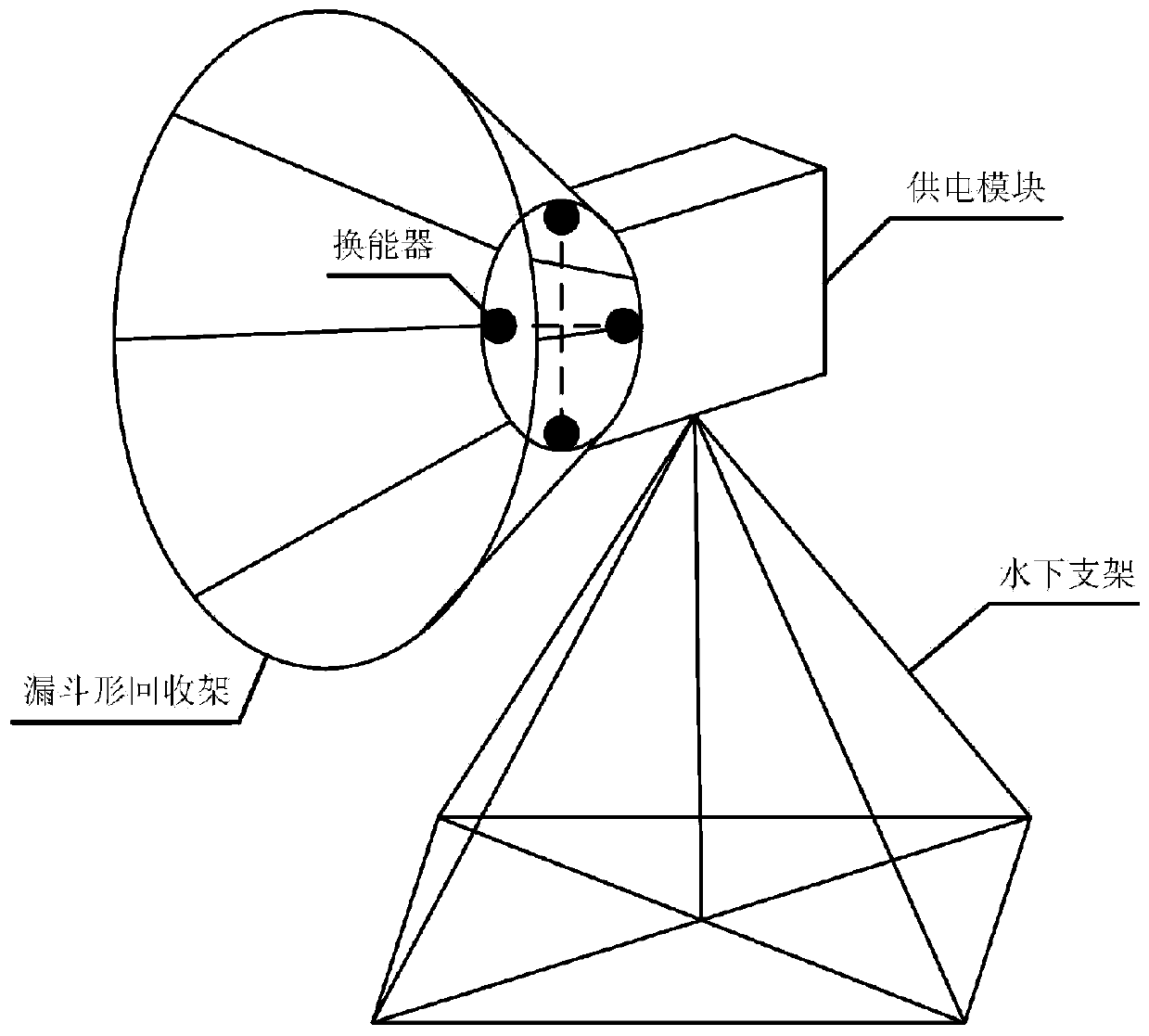
[0039] The underwater recovery platform adopted in the present invention is as figure 1 As shown, the number of installed transducers is 4 as an example (actually 2 to 4). The underwater recovery platform is composed of a funnel-shaped recovery frame, a transducer, an underwater support, and a power supply module. The transducers are installed on the horizontal central axis and the vertical central axis of the narrow mouth of the funnel-shaped recovery frame. Different transducers send FM signals of different frequency bands, but their baseband signals are all the same. The autonomous underwater robot AUV used in the present invention is mainly composed of an acoustic receiver, a GPS module, a gyroscope, an inertial navigation module, an underwater camera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More