

Pinching and flexible shaft drive drum tensioning belt wrapping grabbing composite mechanical hand and method
A flexible shaft transmission and manipulator technology, applied in the field of composite manipulators, can solve the problems of small size adaptability, inability to envelop grasping, no shape adaptability, etc., and achieve the effects of good contact characteristics and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
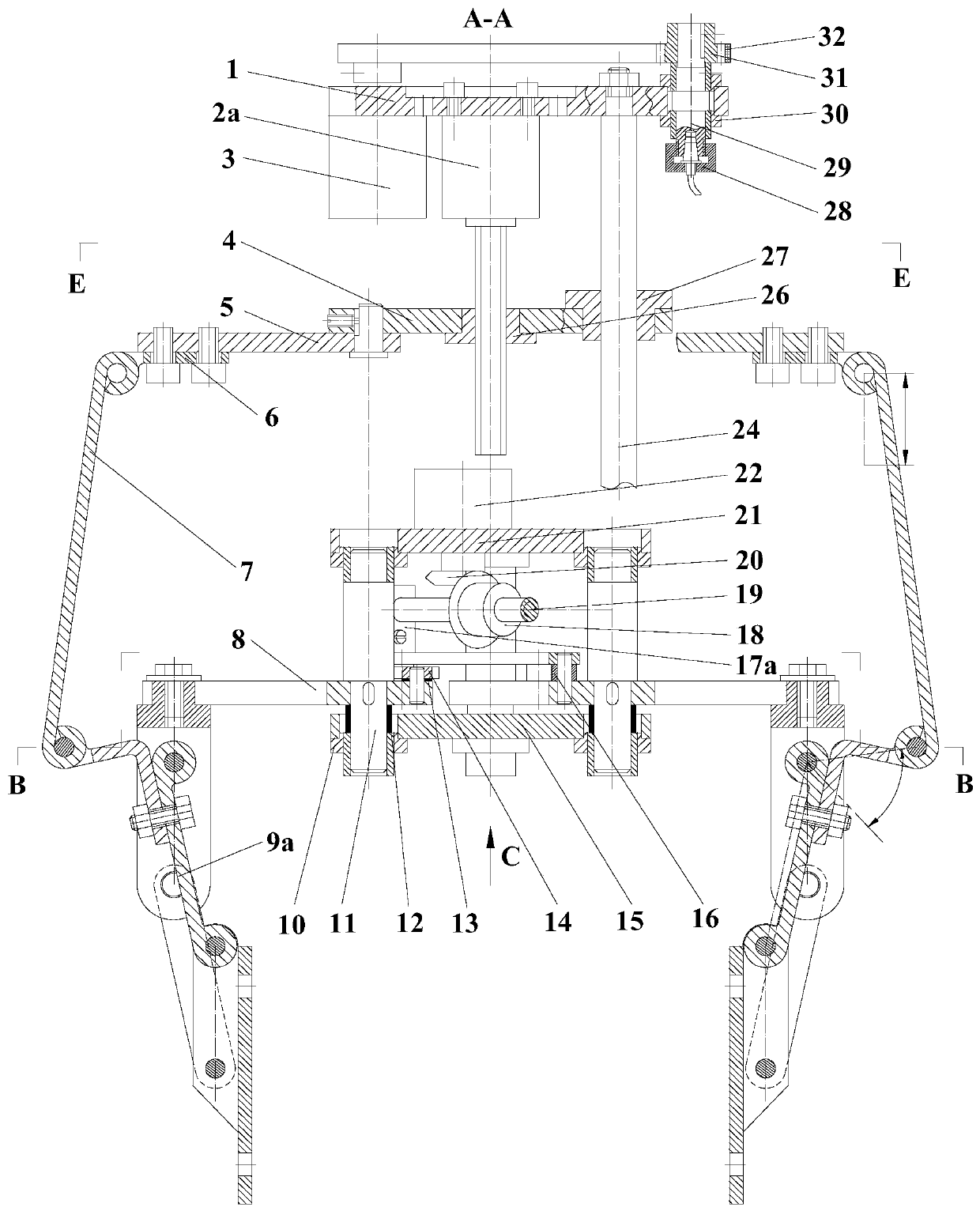
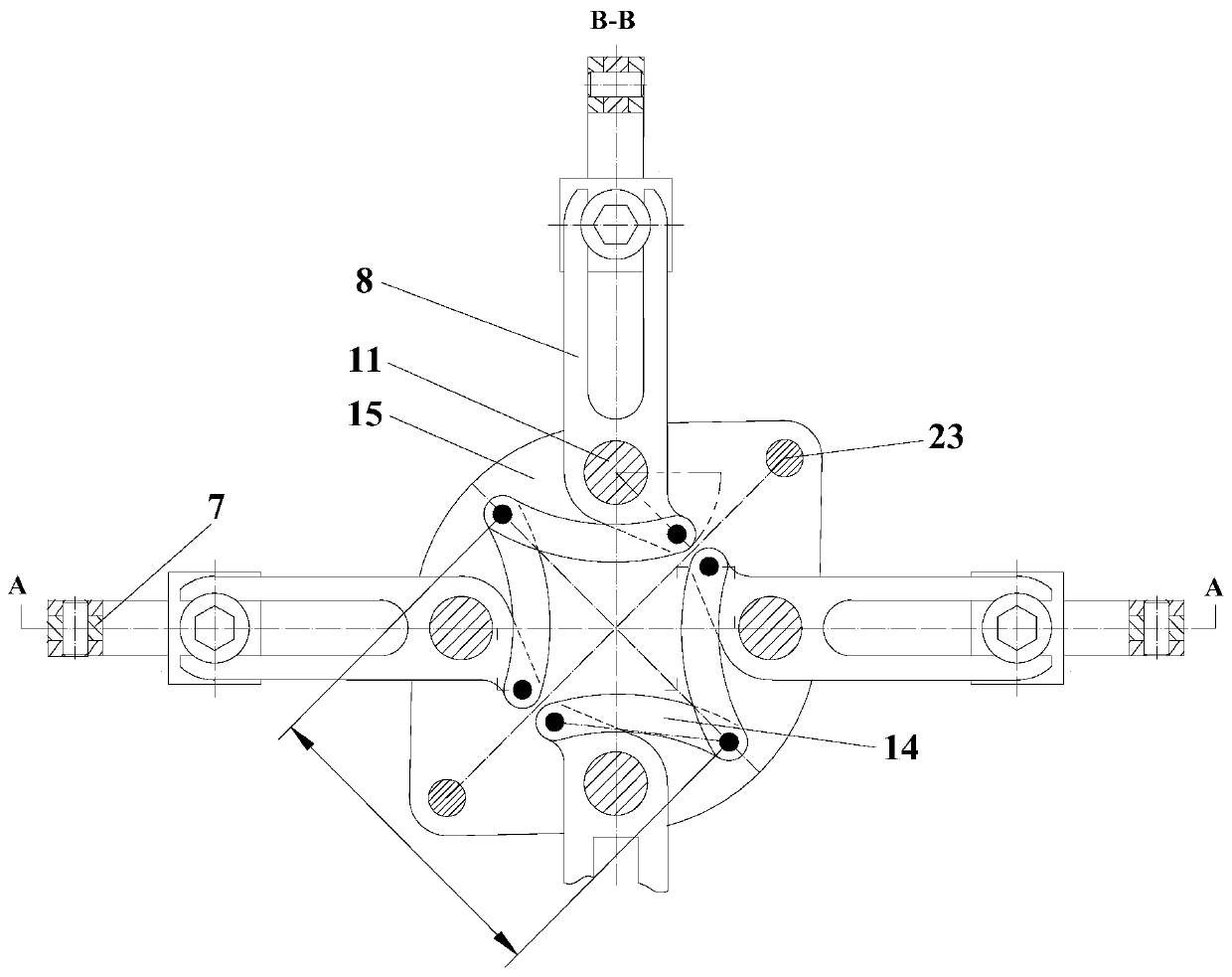
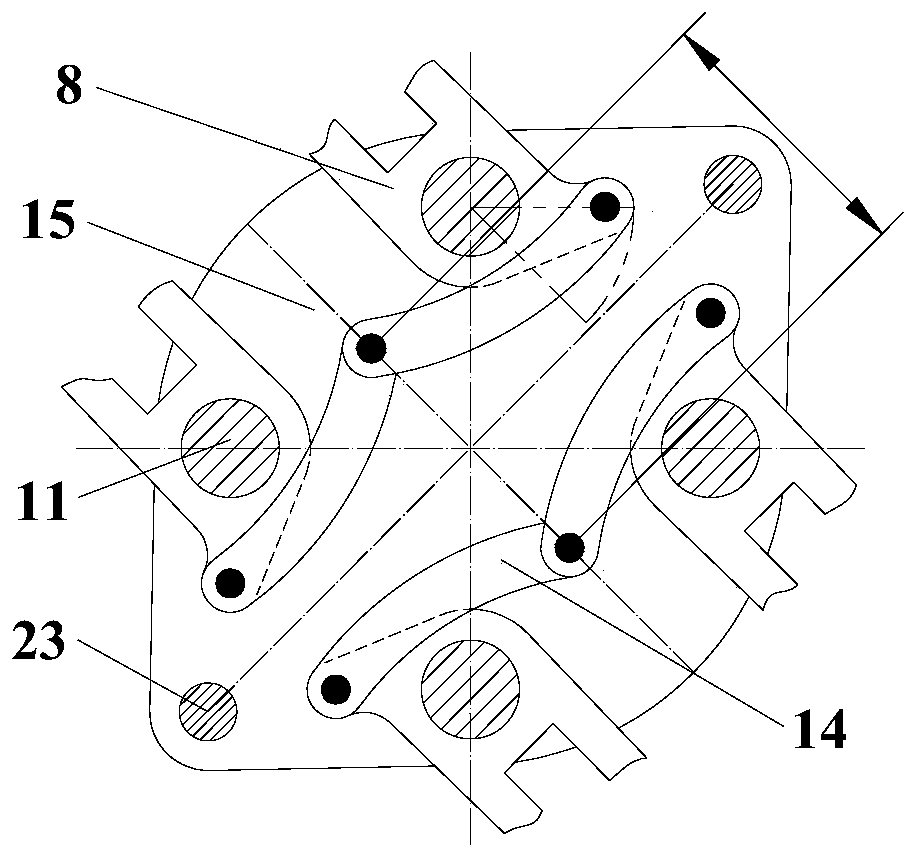
[0123] When adopting translational clamping finger 9a, the base of the finger is rotated and driven to select any one of clamping motor 2a or short-stroke cylinder 2b; the size of the contact force is determined by the size of the contact position and the driving force (torque), and the size of the contact position It is related to the size and contact state of the object to be grasped, and is established (consisting of a push plate 4, a bar-shaped index plate 5, a flat-mounted double-ear seat 6, a push rod 7, a fork-shaped index plate 8, and a translation clamping finger 9a ) mechanical equations of the connecting rod system, control parameters such as the angular displacement and output torque of the clamping motor 2a, the displacement and the driving force of the short-stroke cylinder 2b can be obtained according to these mathematical models, and the control method: ① select the clamping motor 2a, and The contact force is controlled by the output torque of the clamping motor...
Embodiment 2
[0125] When wrapping and grabbing finger 9b is used, the pinching method of adjustable nail tip 9b7 is the same as the control method of the aforementioned translation gripping finger 9a; the wrapping and grabbing method is used to grab spheres, horizontally place cylinders, and ellipsoids , Irregular objects made of curved surfaces, and objects with complex contact forces (such as peaches, soft-packed goods), the adjustable nail tip 9b7 has a waist-shaped groove, which can be retracted for installation or directly removed when needed;
[0126] The clamping motor 2a and the winding motor 3b can be controlled in forward and reverse directions and precise control of angular displacement, but the response speed is not as good as that of pneumatic components; while the vane-type rotary cylinder 3a can be controlled in forward and reverse directions, which cannot realize precise control of angular displacement and has a short stroke Cylinder 2b can be controlled by reciprocating mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More