

Negative obstacle detection method and device, terminal equipment and storage medium
An obstacle detection and obstacle technology, applied in the field of robotics, can solve problems such as waste of resources, achieve the effect of reducing processing capacity and saving computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
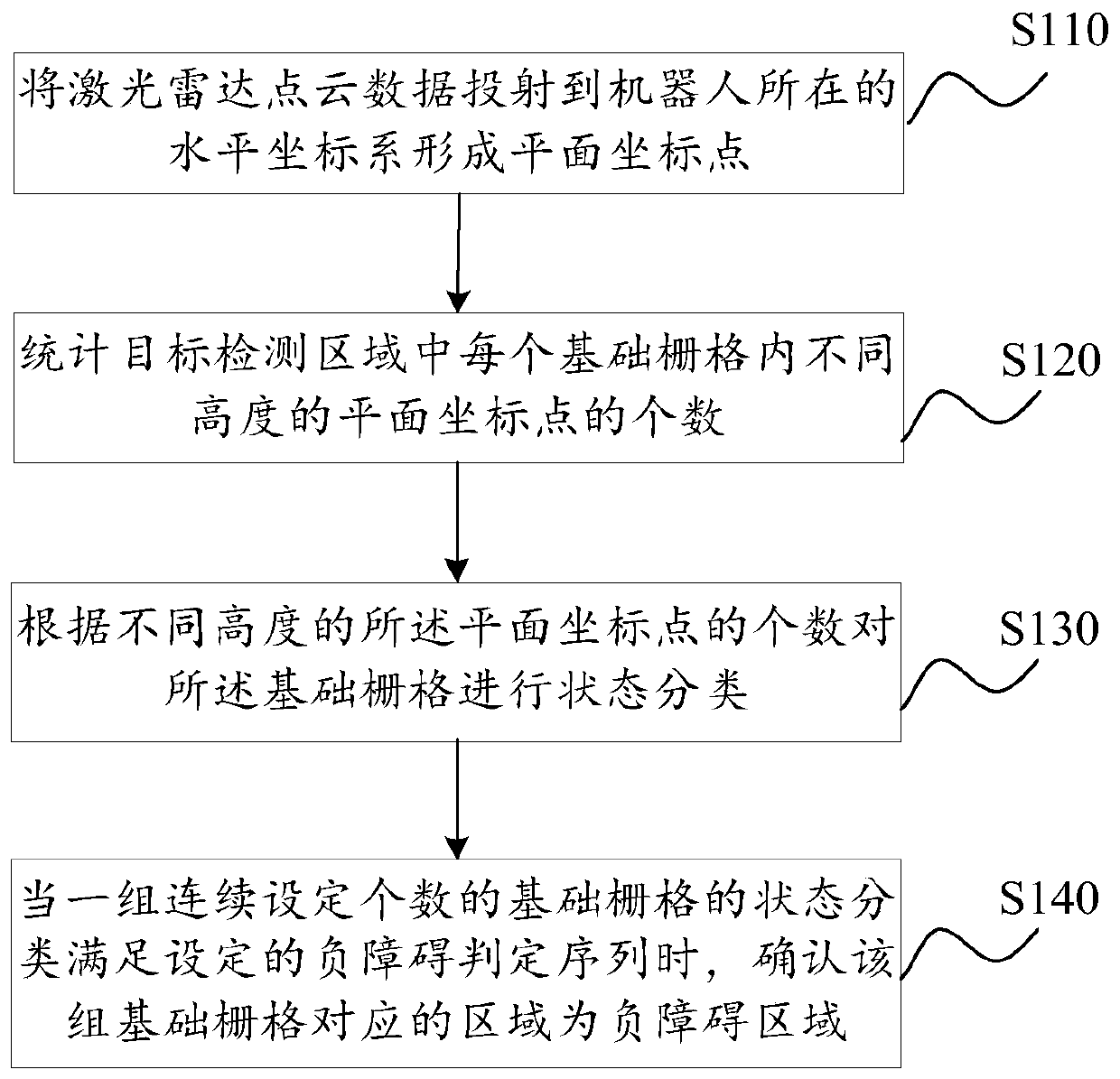
[0056] figure 2 It is a flowchart of a negative obstacle detection method provided by Embodiment 1 of the present invention. The negative obstacle detection method provided in the embodiment can be performed by an audio transmission device, which can be realized by software and / or hardware. The audio transmission device can be composed of two or more physical entities, or can be A physical entity constitutes. For example, an audio transmission device can be a mobile phone, an industrial control computer, etc.
[0057] Step S110: Project the lidar point cloud data to the horizontal coordinate system where the robot is located to form plane coordinate points.
[0058] The point cloud data detected by the lidar is three-dimensional coordinate data, and each point cloud data passes the distance from the origin in three two-by-two perpendicular dimensions (such as the forward direction, the lateral and vertical directions perpendicular to the forward direction), Characterizes t...
Embodiment 2
[0069] Figure 4 It is a flow chart of a negative obstacle detection method provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments.
[0070] Specifically, refer to Figure 4 , the negative obstacle detection method provided in this embodiment specifically includes:
[0071] Step S201: Map the lidar point cloud data to the robot coordinate system to obtain environment point cloud data.
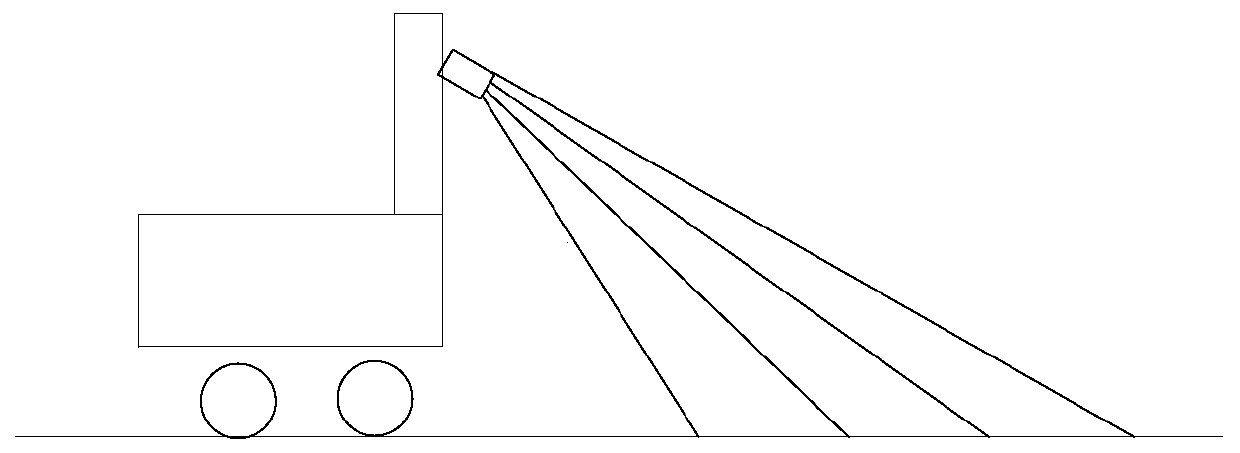
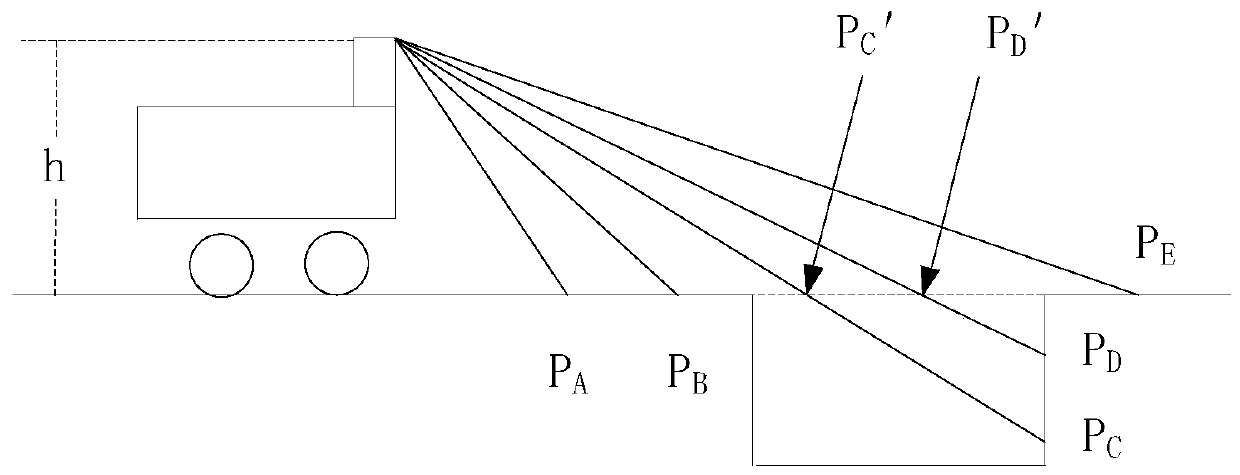
[0072] The laser radar coordinate system is established with the laser radar as the coordinate origin. The laser radar output is generally point cloud data in the laser radar coordinate system. Knowing the installation position of the laser radar on the robot, the environment based on the robot coordinate system can be calculated. point cloud data. Generally speaking, the direction of the lidar is at a certain angle with the horizontal direction. The design of the angle enables the robot to identify obstacles below its ...
Embodiment 3
[0086] Figure 6 It is a schematic structural diagram of a negative obstacle detection device provided in Embodiment 3 of the present invention. refer to Figure 6 , the negative obstacle detection device includes: a coordinate projection unit 310, a quantity statistics unit 320, a grid classification unit 330 and a sequence judgment unit 340.
[0087] The coordinate projection unit 310 is used to project the lidar point cloud data to the horizontal coordinate system where the robot is located to form plane coordinate points; the quantity statistics unit 320 is used to count the plane coordinate points of different heights in each basic grid in the target detection area The target detection area is located in the horizontal coordinate system, and the grid composed of the basic grid covers the target detection area; the grid classification unit 330 is used for The number classifies the state of the basic grids; the sequence judging unit 340 is used to confirm the group of ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More