

Auxiliary supporting robot for mirroring machining of thin-wall components and following supporting method thereof
A technology of thin-walled components and mirror image processing, which is applied in the field of mechanical processing, can solve problems such as low intelligence, poor support rigidity, and insufficient follow-up ability, and achieve the effects of improving informatization, ensuring convenience, and improving adaptability to working conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
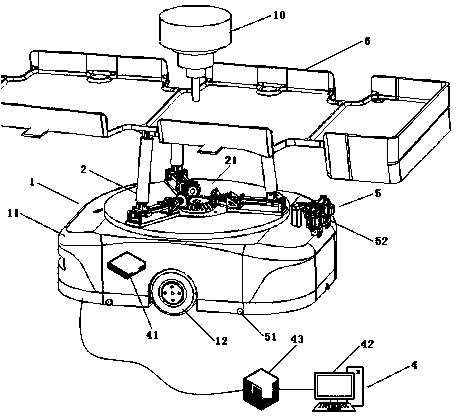
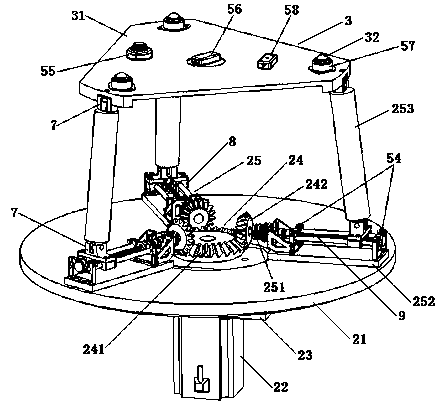
[0041] This embodiment discloses an auxiliary supporting robot for mirror image processing of thin-walled components. figure 1 , including a mobile unit 1 , a parallel lifting unit 2 , a follower support unit 3 , an electric control system 4 and a sensing system 5 . Among them, the mobile unit 1 is located at the bottom layer, and is mainly used to realize the actions of supporting the robot to move forward, backward, turn, and in situ forward and reverse rotation; support the thin-walled area of the workpiece to be processed; the follow-up support unit 3 is on the top layer and is mainly used to support the thin-walled area of the workpiece to be processed. It is used to provide power for the supporting robot, and to perform operations such as data collection and mathematics, input instructions, communication and data exchange during the processing; furthermore, the sensor system 5 runs through the entire supporting robot and is mainly used for real-time monitoring during...
Embodiment 2
[0045] This embodiment discloses an auxiliary supporting robot for mirror image processing of thin-walled components. figure 1 , including a mobile unit 1 , a parallel lifting unit 2 , a follower support unit 3 , an electric control system 4 and a sensing system 5 . Among them, the mobile unit 1 is located at the bottom layer, and is mainly used to realize the actions of supporting the robot to move forward, backward, turn, and in situ forward and reverse rotation; support the thin-walled area of the workpiece to be processed; the follow-up support unit 3 is on the top layer and is mainly used to support the thin-walled area of the workpiece to be processed. It is used to provide power for the supporting robot, and to perform operations such as data collection and mathematics, input instructions, communication and data exchange during the processing; furthermore, the sensor system 5 runs through the entire supporting robot and is mainly used for real-time monitoring during...
Embodiment 3
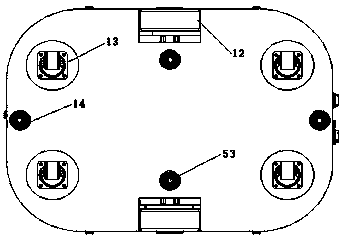
[0071] This embodiment discloses a thin-walled component mirror image processing auxiliary support robot follow support method, refer to the description attached figure 1 , figure 1 It is a schematic diagram of the overall structure of the application. During the processing, the thin-walled member 6 to be processed is located between the processing spindle 10 and the supporting robot, forming an approximate mirror image layout; the supporting robot uses the parallel lifting unit 2 on the mobile unit 1 to control the follow-up support The unit 3 supports the thin-walled area to be processed in a suitable posture; the robot body electric control 41 supporting the robot is responsible for providing various power supplies, data collection and processing, etc., and establishes a communication mechanism with the remote controller 42 through the server 43; The supporting robot utilizes two independent drive wheels 12 installed on the mobile unit 1, and with the help of feedback from ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More