

A Grab Positioning Method for Unmanned Cranes in a Combined Storage Material Management System
A technology of combined storage and positioning methods, which is applied in the field of unmanned crane grab positioning, can solve problems such as complex algorithms, low manual operation efficiency, repetitive and boring operations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further explained below in conjunction with the accompanying drawings and examples, and the protection scope of the present invention cannot be limited by this. The purpose of disclosing the present invention is to protect all technical improvements within the scope of the present invention.
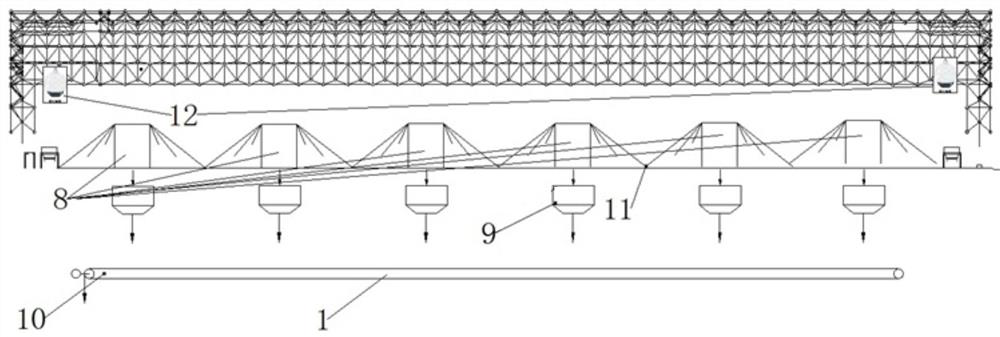
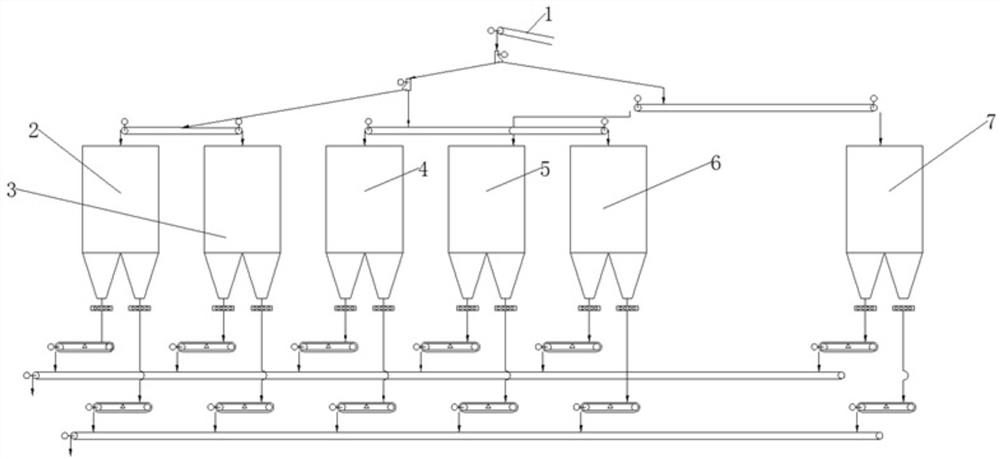
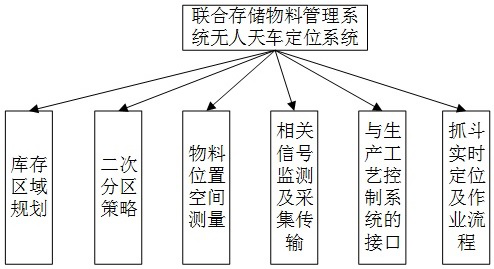
[0040] combined with Figure 1-4 An unmanned crane grab positioning method for a combined storage material management system, comprising the following steps:
[0041] 1. Inventory area planning for incoming materials in the joint inventory system;
[0042] The inventory area planning of the joint storage system is planned according to six kinds of materials. According to the ratio, the area of the storage area is 90 meters * 40 meters, and it is planned to be 6 rectangular partitions, which are respectively 1#-6# material storage area 8; one kind of material, one partition , the large ratio material partition is located in the middle of the storage...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More