

Surgical navigation system, surgical robot system for acetabulum osteotomy and control method of surgical robot system
A technology of surgical robot and surgical navigation, applied in the field of medical equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
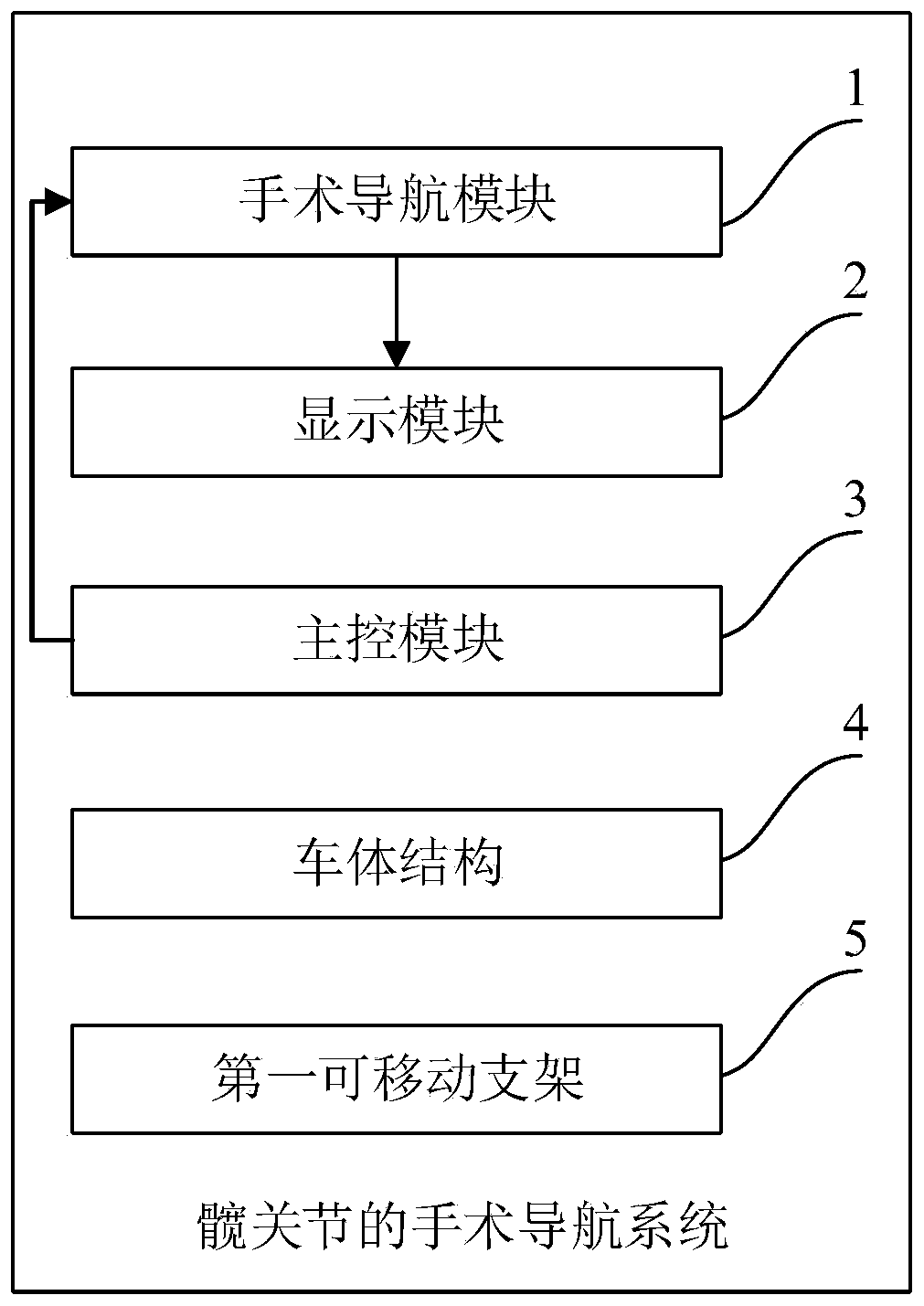
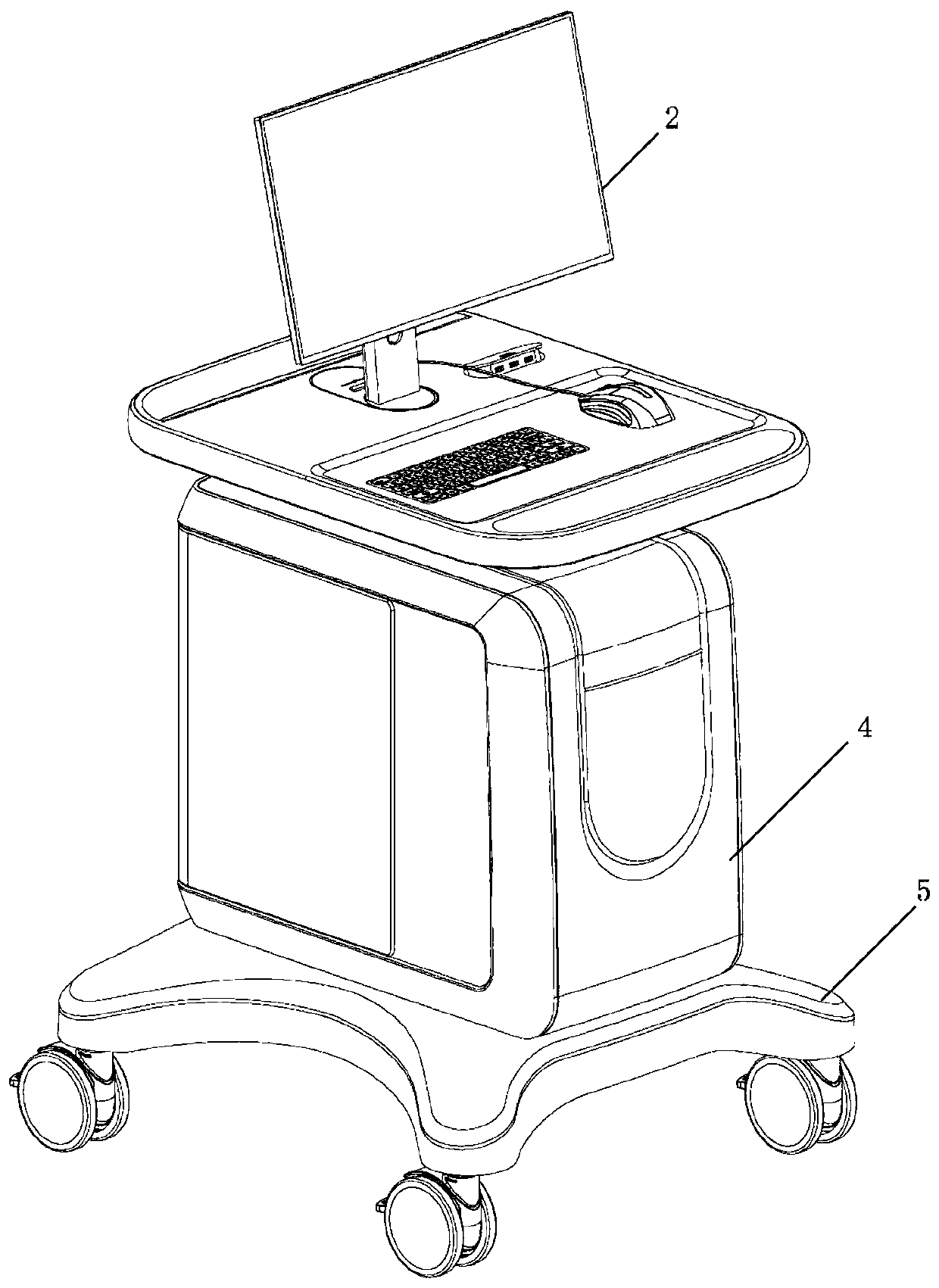
[0100] Such as figure 1 As shown, the surgical navigation system for the hip joint in this embodiment includes a surgical navigation module 1 , a display module 2 , a main control module 3 , a vehicle body structure 4 and a first movable support 5 .
[0101] The surgical navigation module 1 is used for acquiring image data of hip joint images, and establishing a three-dimensional model of the hip joint based on the image data.
[0102] In an optional implementation manner, the surgical navigation module 1 is used to segment the image of the hip joint to obtain multiple segmented images, and establish a three-dimensional model of the hip joint according to the image data corresponding to the multiple segmented images.
[0103] Among them, the image data is a CT (computerized tomography) scan image of the patient's dysplastic acetabulum, specifically including the shape and cross-sectional shape of the pelvis and femur. Based on these data, the three-dimensional model of the hip...
Embodiment 2
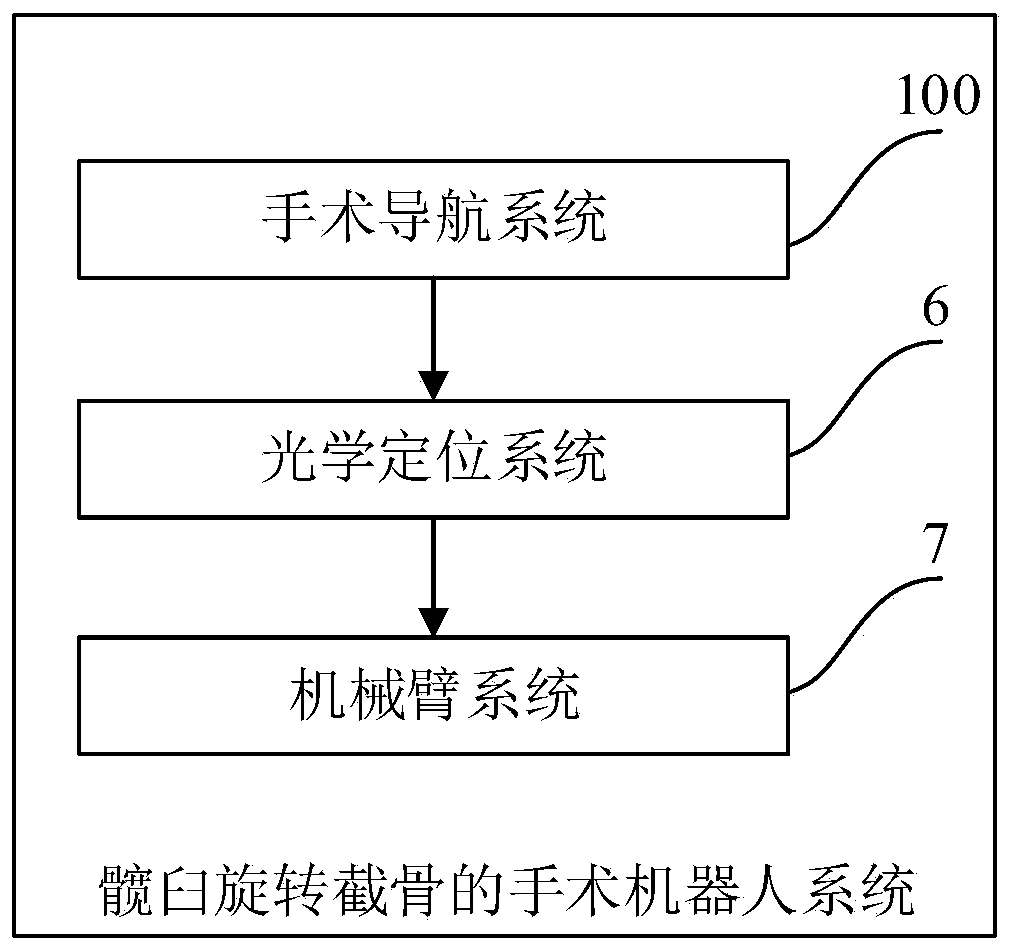
[0119] Such as image 3 As shown, the surgical robot system of the acetabular rotary osteotomy of the present embodiment includes the surgical navigation system 100 of the hip joint in Embodiment 1, and the surgical robotic system of the acetabular rotary osteotomy of the present embodiment also includes the optical positioning system 6 and the mechanical Arm system7. The optical positioning system 6 is communicatively connected with the surgical navigation system 100 and the robotic arm system 7 respectively.
[0120] The surgical navigation system 100 is used to generate a sequence of motion commands according to the three-dimensional model of the hip joint, and send the position of the center of the ball and the sequence of motion commands to the optical positioning system 6;
[0121] During the acetabular rotation osteotomy, the optical positioning system 6 is used to convert the position of the center of the sphere into the center point of the patient's acetabulum, and s...
Embodiment 3
[0129] The surgical robot system for rotational osteotomy of the acetabulum of this embodiment is a further improvement on Embodiment 2, specifically:
[0130] The surgical navigation system 100 is used to acquire three-dimensional morphological parameters, force line parameters of the lower limbs, diameter parameters of the acetabular fossa, edge shape parameters of the acetabulum, and orientation parameters of the acetabulum according to the three-dimensional model of the hip joint;
[0131] Among them, the three-dimensional morphological parameters include the acetabular anteversion and abduction angle; the acetabular anteversion angle in imaging is the angle α between the acetabular axis and the coronal plane, and the abduction angle is the acetabular axis on the coronal plane. Angle β between the projection and the vertical axis.
[0132] The surgical navigation system 100 is also used to determine the target size of the end tool according to the three-dimensional morphol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More