

Intelligent robot spraying method based on spraying system
A kind of intelligent robot and robot technology, applied in the direction of spraying device, etc., can solve the problems such as not being able to solve the adaptability of spraying robot well, achieve the effect of improving spraying precision and spraying quality, improving spraying quality and saving time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
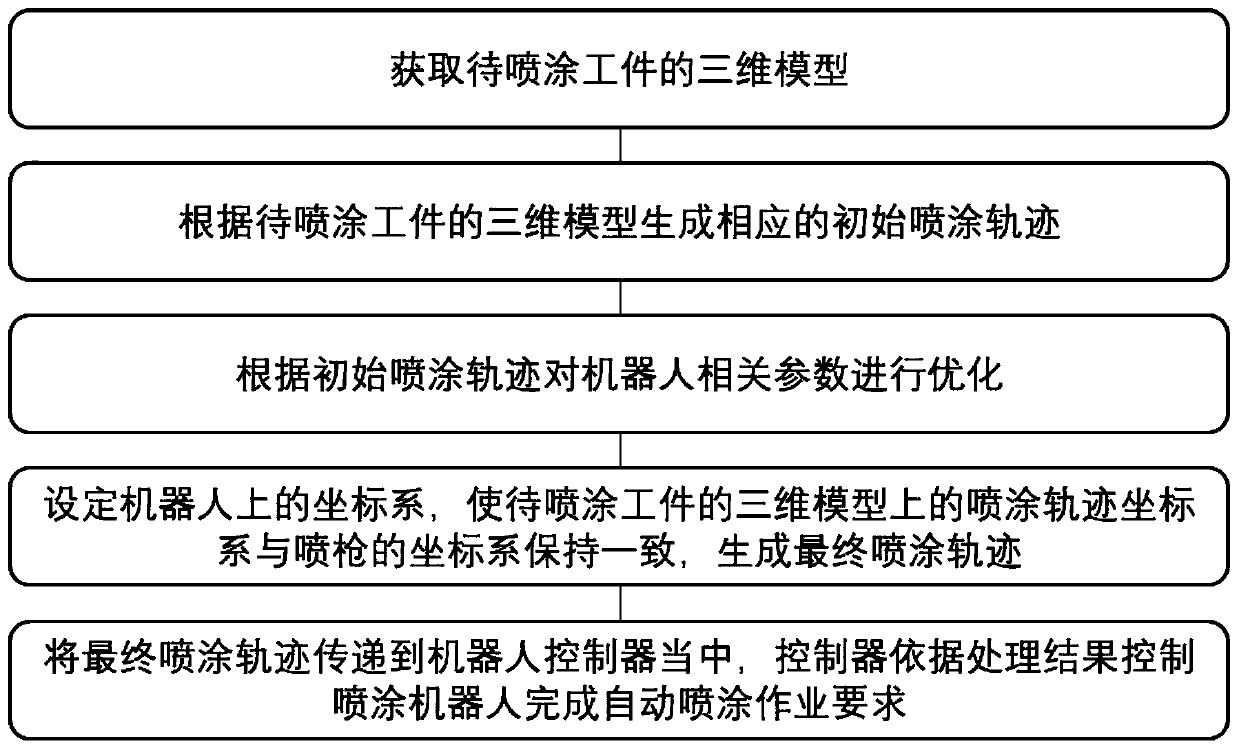
[0043] A kind of intelligent robot spraying method based on spraying system, comprises the following steps:
[0044] 1) Obtain the three-dimensional model of the workpiece to be sprayed;
[0045] 2) Generate the corresponding initial spraying trajectory according to the three-dimensional model of the workpiece to be sprayed;
[0046] 3) Optimize the relevant parameters of the robot according to the initial spraying trajectory;
[0047] 4) Set the coordinate system on the robot so that the spraying trajectory coordinate system on the three-dimensional model of the workpiece to be sprayed is consistent with the coordinate system of the spray gun to generate the final spraying trajectory;
[0048] 5) The final spraying trajectory is transmitted to the robot controller, and the controller controls the spraying robot to complete the automatic spraying operation requirements according to the processing results.
[0049] In the preferred version of this embodiment, the method also ...
Embodiment 2
[0065] This embodiment should be understood as at least including all the features of any one of the foregoing embodiments, and is further described on the basis of it:
[0066] A kind of intelligent robot spraying method based on spraying system, comprises the following steps:
[0067] 1) Obtain the three-dimensional model of the workpiece to be sprayed.
[0068] Step 1) specifically includes as follows:
[0069] 1.1) Obtain the appearance features of the workpiece to be sprayed; wherein, the appearance features include: size, number of planes, number of curved surfaces, material, roughness, etc.;
[0070] 1.2) The image preprocessing operation is performed on the features of the workpiece to be sprayed to eliminate the interference of background information on the image and obtain the preprocessed image;
[0071] 1.3) Carry out image segmentation operation on the preprocessed image, extract useful image feature information and perform modeling operations such as edge detec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More