

Rope-driven under-actuated five-finger manipulator
A rope-driven, manipulator technology, applied in the field of robotics, can solve the problems of unfavorable investment in the parity market, a large number of drive motors, and complex control systems, and achieve the effects of reducing manufacturing costs and weight, compact structure, and simple control systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
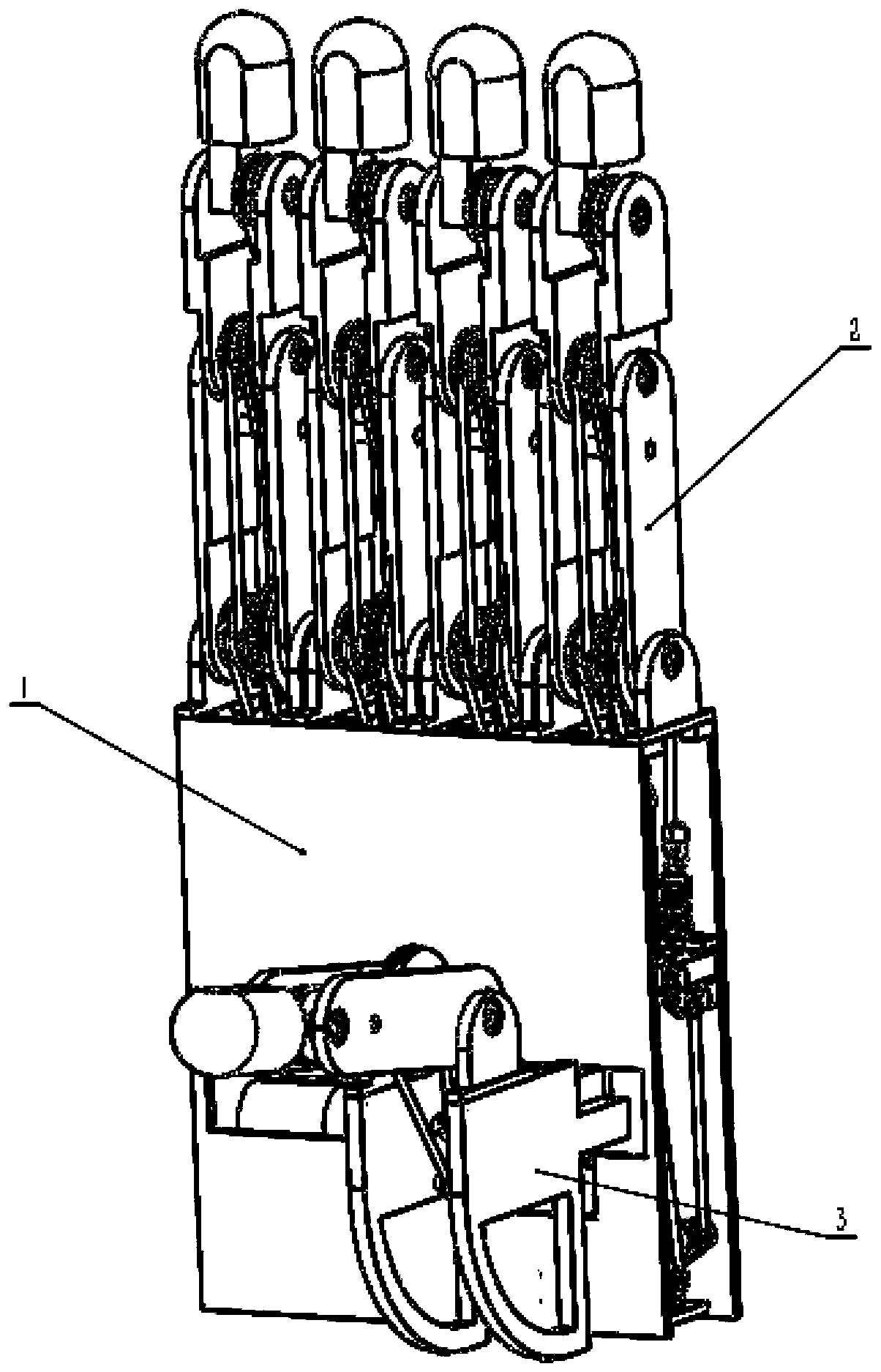
[0035] see figure 1 , this rope drives under-driven five-finger manipulator, including palm 1, thumb 3, and the remaining four fingers 2. The thumb has a swingable metacarpal joint and bendable proximal and distal joints, and the remaining four fingers have flexible proximal and middle joints. , far joint, and the four finger far joints are coupling drives. The whole manipulator has 11 degrees of freedom and 4 coupling degrees of freedom. Each finger is connected to the palm front plate 12 and the palm rear plate 11 by bolt fastening connection respectively. Three motors are installed in the palm, motor one 126 is used to drive five fingers near joints to bend, motor two 130 is used to drive four finger middle joints and thumb far joints to bend, and motor three 118 is used to drive thumb metacarpal joints to swing.
[0036] Due to the modular design, the five fingers of the manipulator are divided into the thumb module and the remaining four-finger modules. The present invent...
Embodiment 2
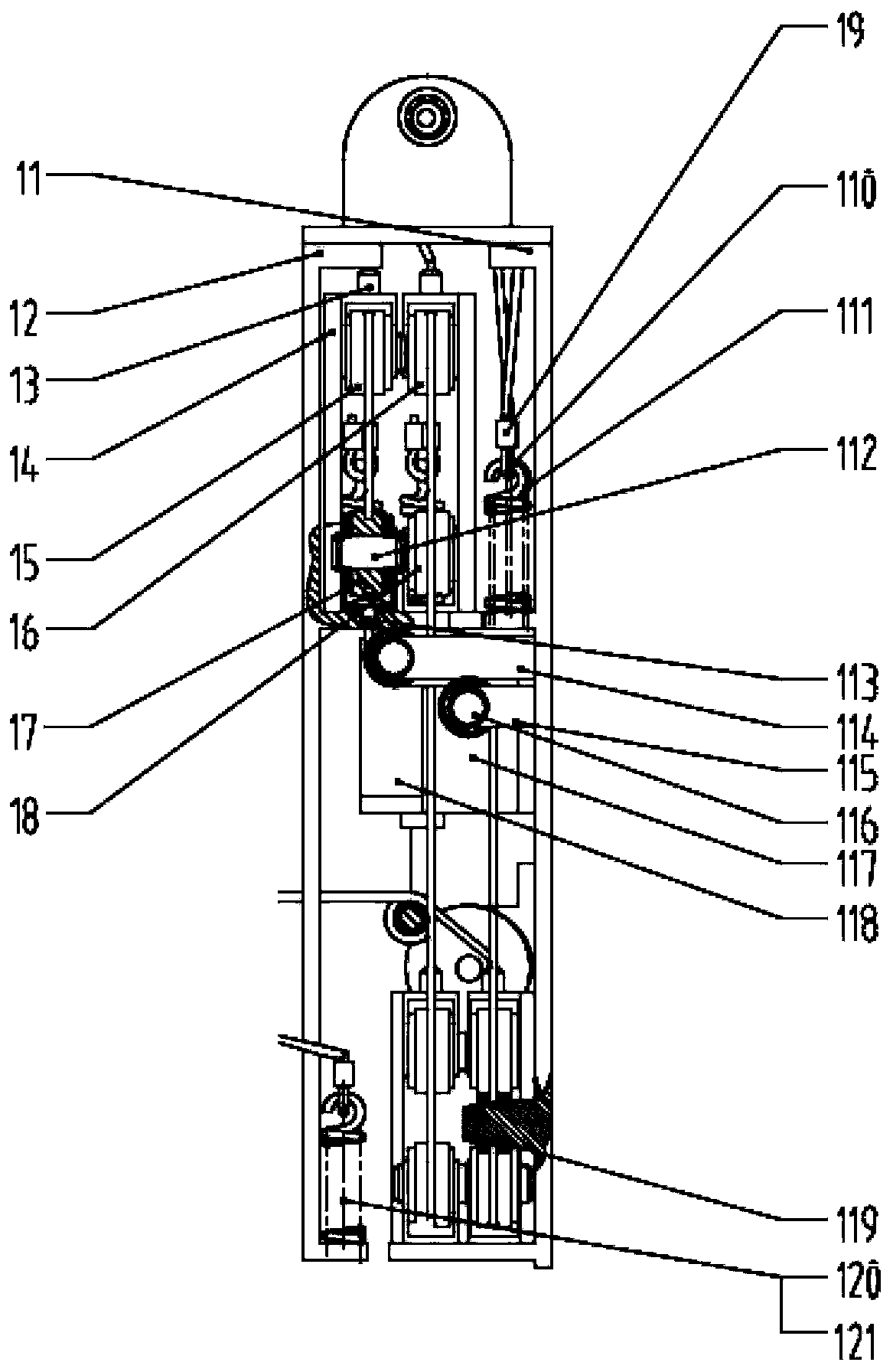
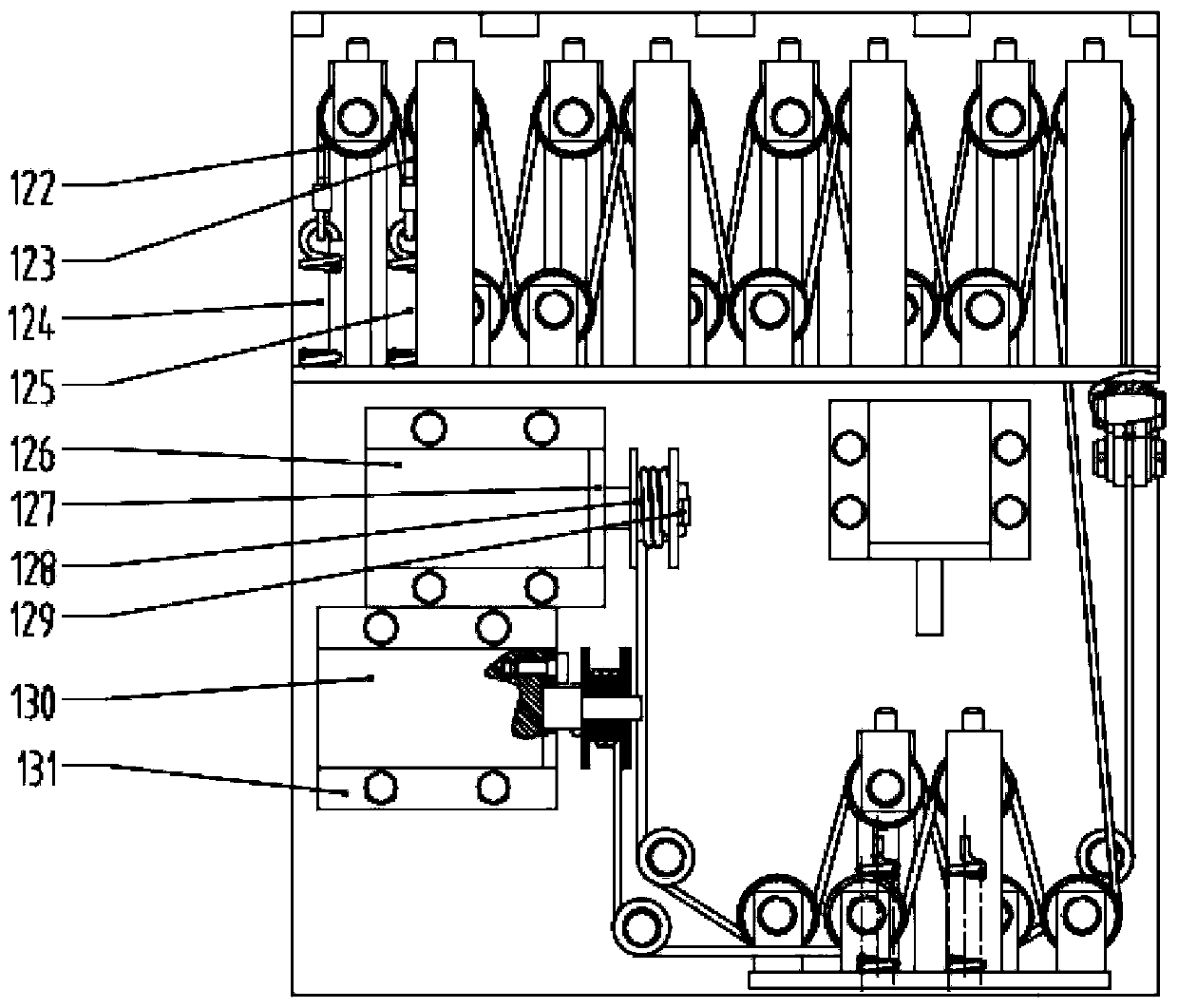
[0038] Embodiment 2 is on the basis of embodiment 1, see figure 2 , image 3 , are respectively the front view and the right view of the palm structure of the rope-driven under-drive five-finger manipulator, the motor frame fixing holes for three motors are set on the palm rear plate 11, and the fixing holes for the steering wheel frame are set on the right side, and the four fingers are welded in the middle Corresponding to the mounting plate of the tension spring, the thumb is welded on the bottom corresponding to the mounting plate of the T-shaped groove, movable pulley, and fixed pulley, and the guide wheel mandrel is welded on both sides. The T-shaped slot 14 is directly embedded in the corresponding slot hole on the mounting plate; the fixed pulley P f1 17. Fixed pulley P f2 18 is connected with the mounting plate bolts through the through hole at the bottom of the pulley frame; the movable pulley P m1 15. Moving pulley P m2 16 is connected with steel wire rope 1 22...
Embodiment 3
[0041] Embodiment 3 is based on embodiment 2, see Figure 4 , is the structure schematic diagram of the index finger of the rope-driven under-driven five-finger manipulator. The index finger 2 is tightly connected with the front and rear plates of the palm through the bearing seat 211; 1 218, one end is connected to the inner movable pulley P of the palm by the threader 13 m1 15. The other end is connected to the tension spring one 110 in the palm by crimping the aluminum sleeve 19, so that the power of the motor one 126 is transmitted from the palm to the forefinger to realize bending near the joint; the steel wire rope two 212 bypasses the double-groove pulley P near the joint 21 210, one end is connected to the inner movable pulley P of the palm through the threader m2 16. The other end is connected to the tension spring 2 111 in the palm by crimping the aluminum sleeve, so that the power of the motor 2 130 is transmitted from the palm to the index finger, and the wire rop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More