Indoor SLAM mapping method and system based on semantic information fusion
A semantic information and semantic map technology, applied in control/regulation systems, two-dimensional position/channel control, instruments, etc., can solve problems such as high complexity and inability to judge
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
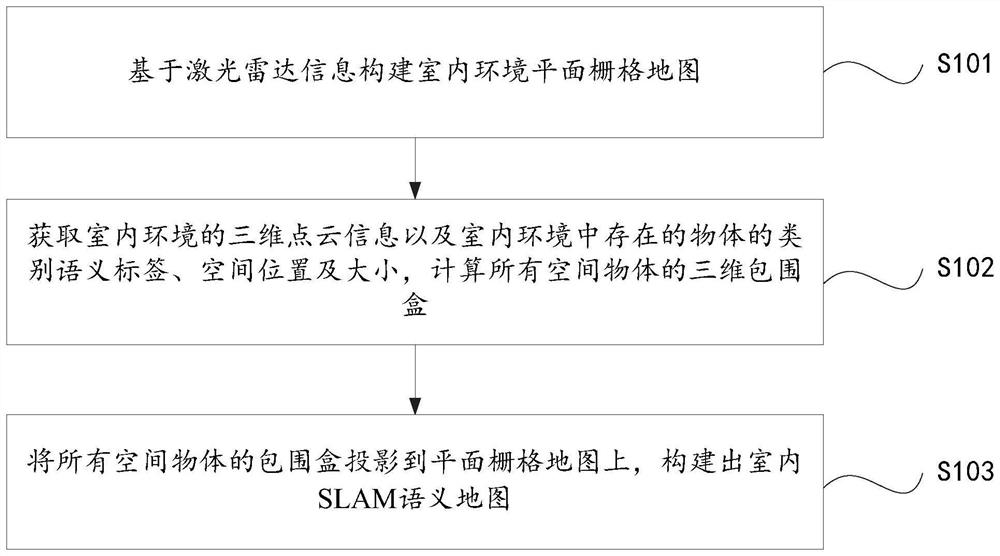
[0036] figure 1 A schematic diagram of the indoor SLAM mapping method based on semantic information fusion of this embodiment is given.
[0037] Such as figure 1 As shown, the indoor SLAM mapping method based on semantic information fusion of this embodiment includes:
[0038] S101: Construct a planar grid map of the indoor environment based on the lidar information.
[0039] In the specific implementation, the Gmapping laser SLAM algorithm based on particle filter is used to construct the planar grid map of the indoor environment. The Gmapping algorithm is based on the filter SLAM framework and integrates the Rao-Blackwellized particle filter algorithm to separate the positioning from the mapping process. In small scenes, the calculation amount is small, the accuracy is high, and the robustness is high. At the same time, the frequency requirement of lidar is low.
[0040] The Gmapping algorithm introduces the RBpf algorithm to separate the two processes of positioning an...
Embodiment 2
[0114] Such as Figure 7 As shown, the indoor SLAM mapping system based on semantic information fusion of this embodiment includes:
[0115] (1) A planar grid map construction module, which is used to construct a planar grid map of an indoor environment based on lidar information.
[0116] In the specific implementation, the Gmapping laser SLAM algorithm based on particle filter is used to construct the planar grid map of the indoor environment. The Gmapping algorithm is based on the filter SLAM framework and integrates the Rao-Blackwellized particle filter algorithm to separate the positioning from the mapping process. In small scenes, the calculation amount is small, the accuracy is high, and the robustness is high. At the same time, the frequency requirement of lidar is low.
[0117] (2) A three-dimensional bounding box calculation module, which is used to obtain three-dimensional point cloud information of the indoor environment and category semantic labels, spatial pos...
Embodiment 3
[0134] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the program is executed by a processor, the steps in the indoor SLAM mapping method based on semantic information fusion as described in Embodiment 1 are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



