

Petrochemical inspection robot navigation and positioning method based on GPS, 5G and vision
A technology of inspection robots and GPS modules, applied in navigation, surveying and navigation, navigation computing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
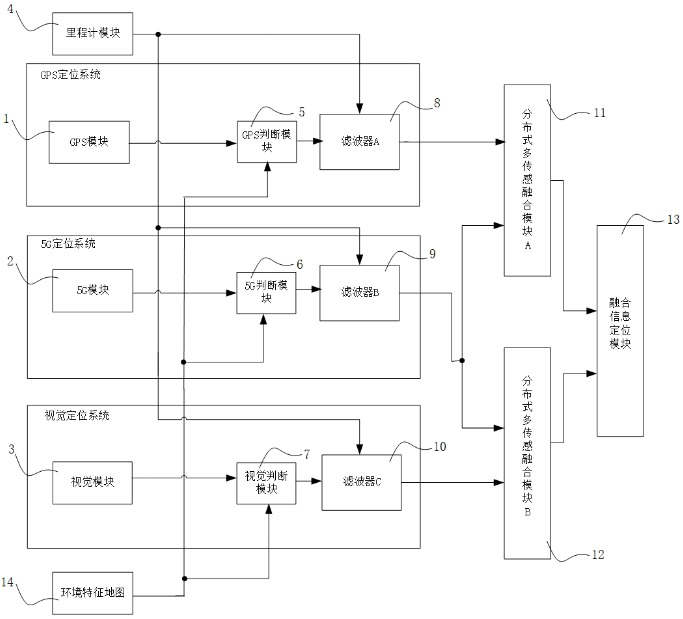
[0047] Attached below figure 1 , 2 The positioning method of the present invention will be further described.
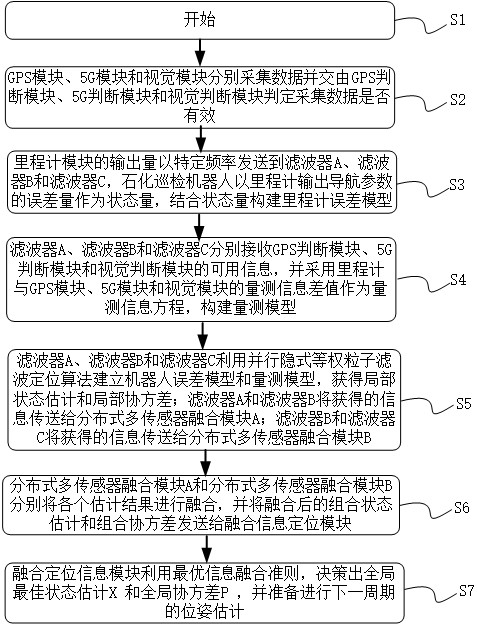
[0048] Based on the positioning method of the above-mentioned navigation and positioning system, its specific implementation steps are as follows:
[0049] Step S1, when the inspection robot starts up and starts working normally, initialize the robot status and the measurement information of GPS module 1, 5G module 2 and vision module 3 ,in k represents discrete time, in, when i =1, 2, and 3 respectively represent the measurement information of GPS module 1, 5G module 2, and vision module 3;
[0050] Step S2, during the normal operation of the robot, the GPS module 1 automatically collects GPS measurement information at a specific frequency during the normal operation of the petrochemical inspection robot and transmits it to the GPS judgment module 5, and the GPS judgment module 5 judges whether the measurement information is Effective; 5G module 2 automatica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More