

Passive-power-assisted exoskeleton load-bearing robot
A robot and exoskeleton technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to adapt to communication networks, wearer comfort effects, complicated wiring, etc., to reduce muscle power consumption, quality without external energy , the effect of many degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
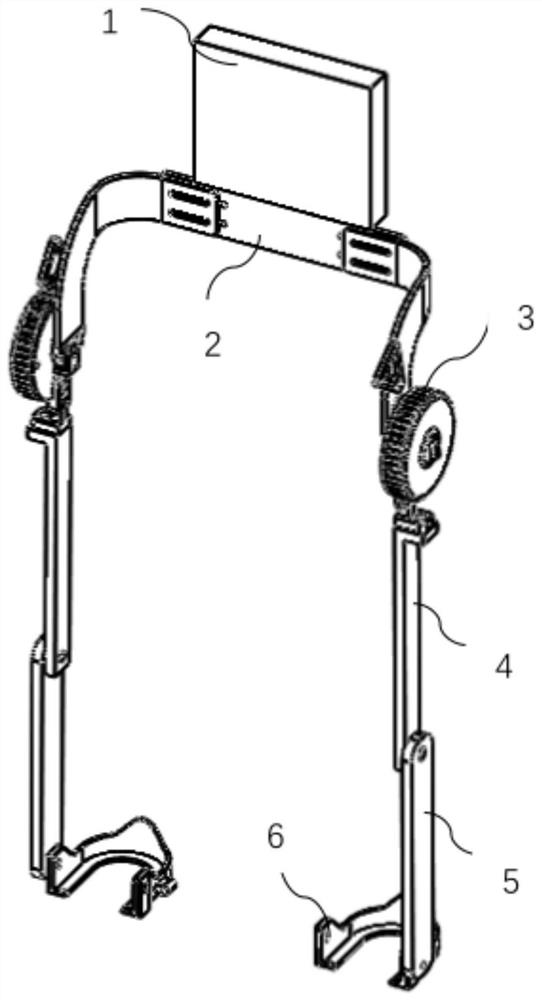
[0034] figure 1 It is a structure diagram of a passively assisted exoskeleton load-bearing robot of the present invention.
[0035] In this example, if figure 1 As shown, a passively assisted exoskeleton load-bearing robot of the present invention includes: 1-load, 2-waist, 3-hip joint energy storage mechanism, 4-thigh, 5-calf, 6-sole;
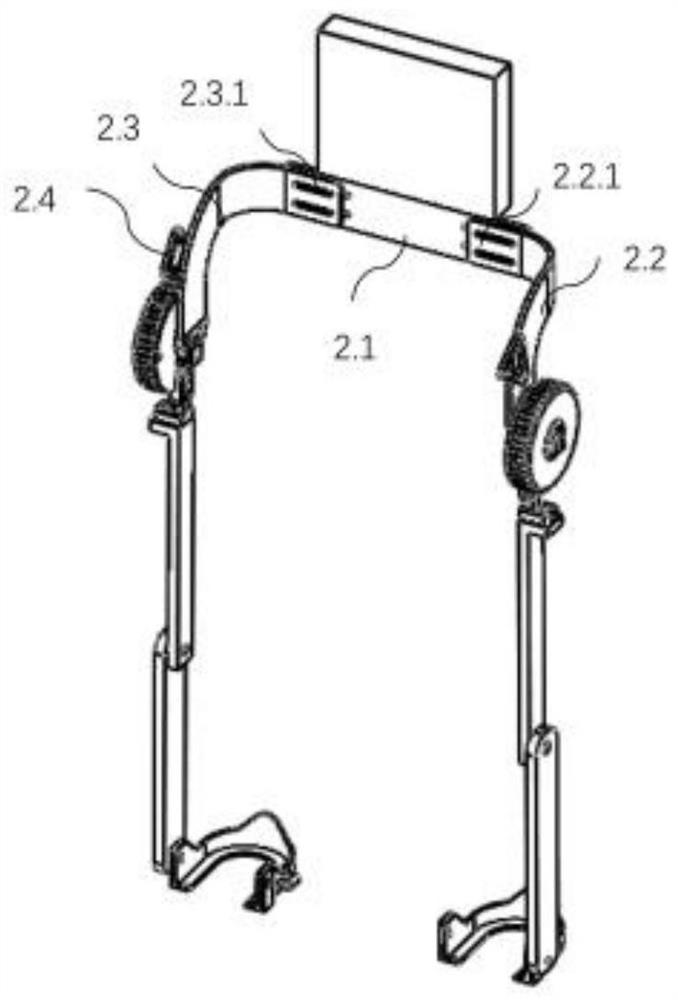
[0036] like figure 2As shown, 2-waist includes: 2.1-waist support plate, 2.2-left waist expansion plate, 2.3-right waist expansion plate and 2.4-belt buckle; wherein, 2.2.1-left waist expansion plate is set on 2.2-left waist expansion plate Waist telescopic plate long hole, 2.3-right waist telescopic plate is provided with 2.3.1-right waist telescopic plate long hole;
[0037] First fix the loaded 1-load on the 2.1-lumbar support plate, and then pass the 2.2-left waist expansion plate and 2.3-right waist expansion plate through the long holes of 2.2.1-left waist expansion plate and 2.3.1-right waist The long holes of the expansion plate a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More