

Welding robot and welding method
A technology for welding robots and robot bodies, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of oversized mechanical arms, complex structures, unfavorable welding operations, etc., to improve welding efficiency and welding Accuracy, good welding ability, and the effect of expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
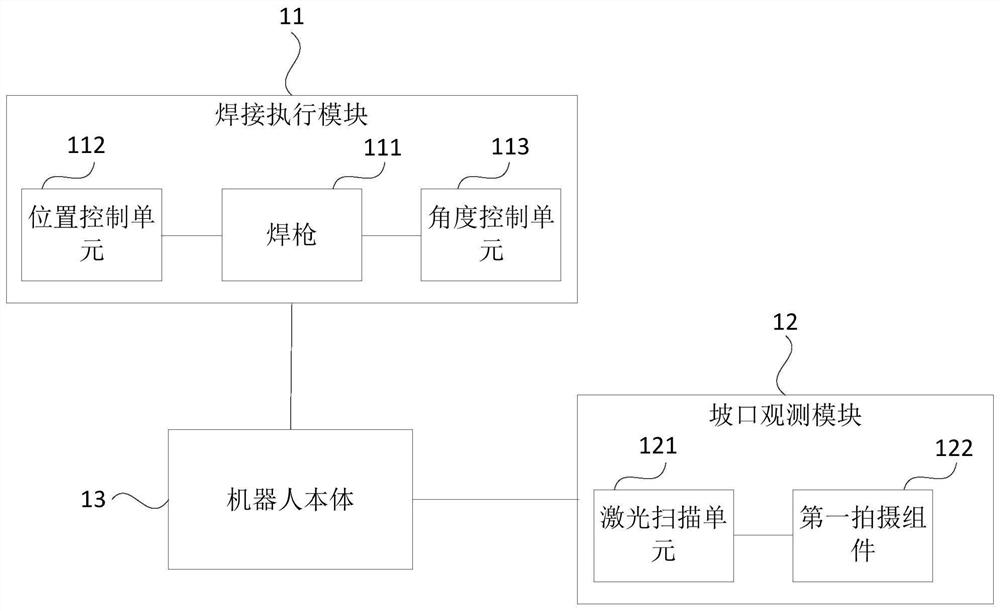
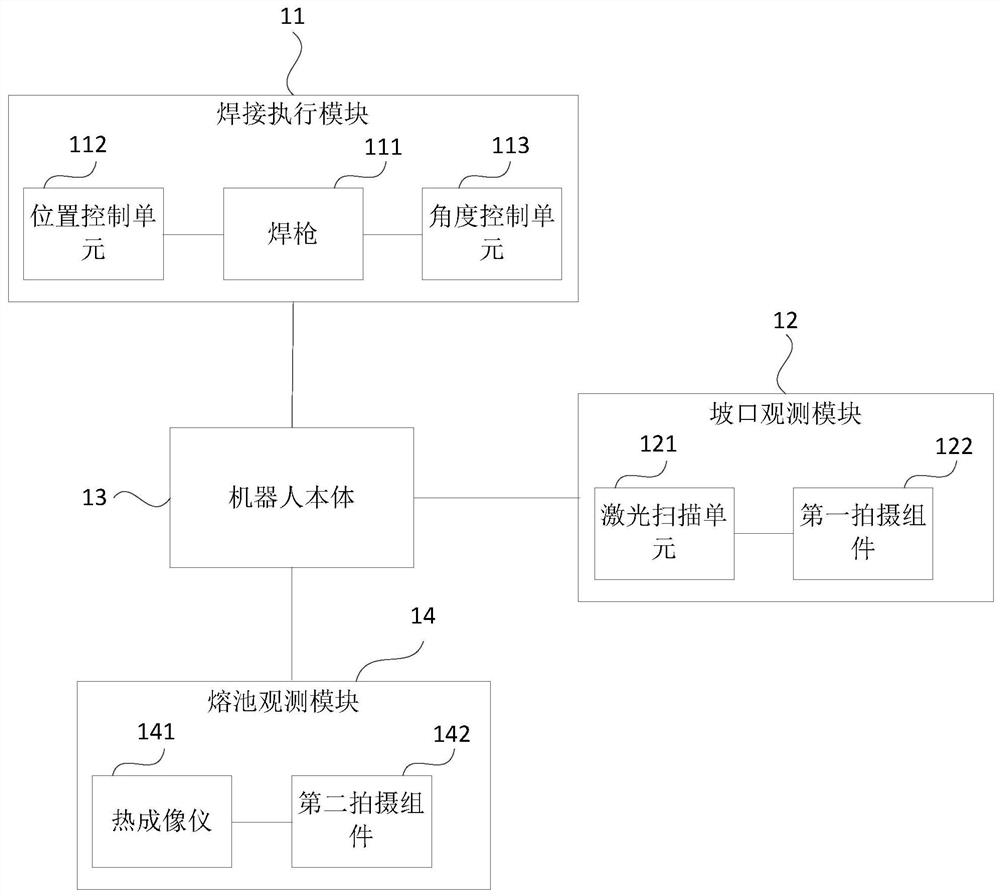
[0053] Figure 1A A structural block diagram of a welding robot provided in Embodiment 1 of the present invention, the welding robot includes: a welding execution module 11, a groove observation module 12 and a robot body 13; the welding execution module 11 and the groove observation module 12 are all located at the front end of the robot body 13;
[0054] The welding execution module 11 includes a welding torch 111, a position control unit 112 and an angle control unit 113; the welding torch 111 is used to perform a welding operation; the welding torch 111 is a part that specifically performs a welding operation during the welding process. The heat generated by high current and high voltage gathers at the terminal of the welding torch, melts the welding wire, and the melted welding wire penetrates into the part to be welded. After cooling, the objects to be welded are firmly connected into one. The position control unit is used to control the welding position of the welding t...
Embodiment 2
[0063] figure 2 It is a flowchart of a welding method provided in Embodiment 2 of the present invention. This embodiment is applicable to the welding operation performed by the welding robot in Embodiment 1. This method can be performed by the welding device in Embodiment 3 of the present invention. The device can be implemented by means of software and / or hardware, and integrated into the welding robot in Embodiment 1. The method specifically includes the following steps:
[0064] S210. When the target welding task is obtained, analyze the target welding task to obtain task information; wherein the task information includes target position point, target welding point, target welding angle and target welding trajectory.
[0065] The target position point is the position that the robot body of the welding robot needs to reach. By controlling the center point of the lower end surface of the robot body to reach the target position point, the mobile control operation of the robot...
Embodiment 3
[0075] image 3 It is a structural block diagram of a welding device provided in Embodiment 3 of the present invention. The device specifically includes: a welding task acquisition module 310, a position and attitude control module 320, an original information acquisition module 330, a welding torch control module 340, and a welding operation execution module 350 and a weld acquisition module 360 .
[0076] The welding task acquisition module 310 is configured to analyze the target welding task to obtain task information when the target welding task is acquired; wherein, the task information includes target position points, target welding points, target welding angles and target welding trajectories ;
[0077] A position and attitude control module 320, configured to control the movement of the robot body to the target position point, and adjust the attitude of the robot body according to the attitude information recorded by the gyroscope;
[0078] The original information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More