

Variable-rigidity lower limb exoskeleton robot based on shape memory alloy
An exoskeleton robot and memory alloy technology, applied in the field of human-machine fusion, can solve the problems of ineffective application of exoskeleton equipment, exoskeleton system volume, weight, and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing and example.
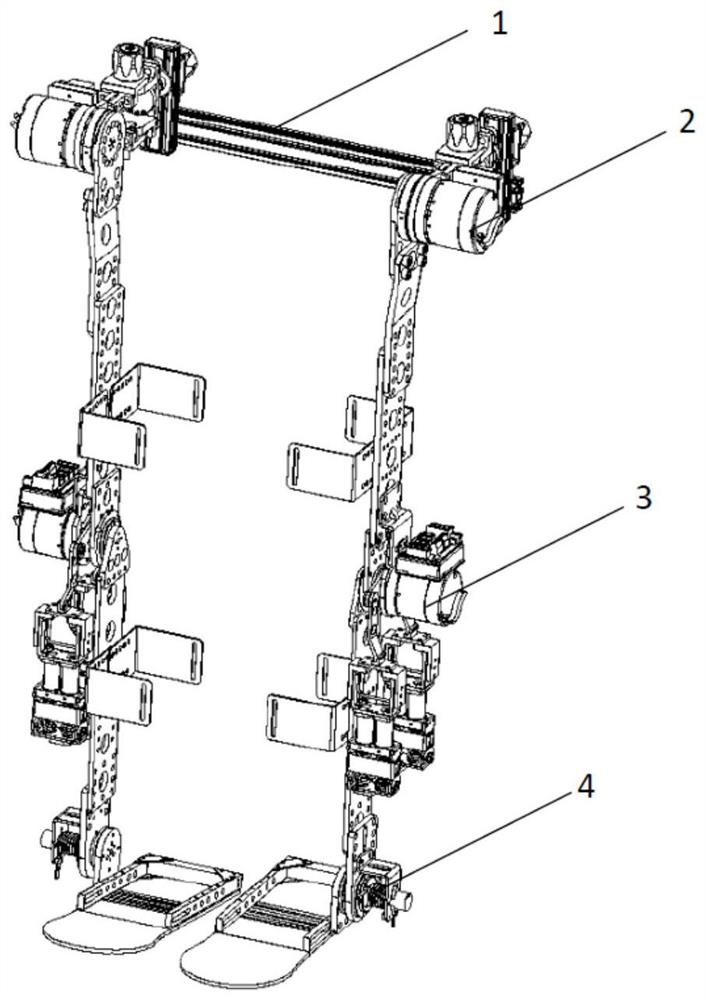
[0029] Such as figure 1 As shown, a lower limb exoskeleton robot with variable stiffness includes a back beam 1 , a hip joint 2 , a knee joint 3 , and an ankle joint 4 .
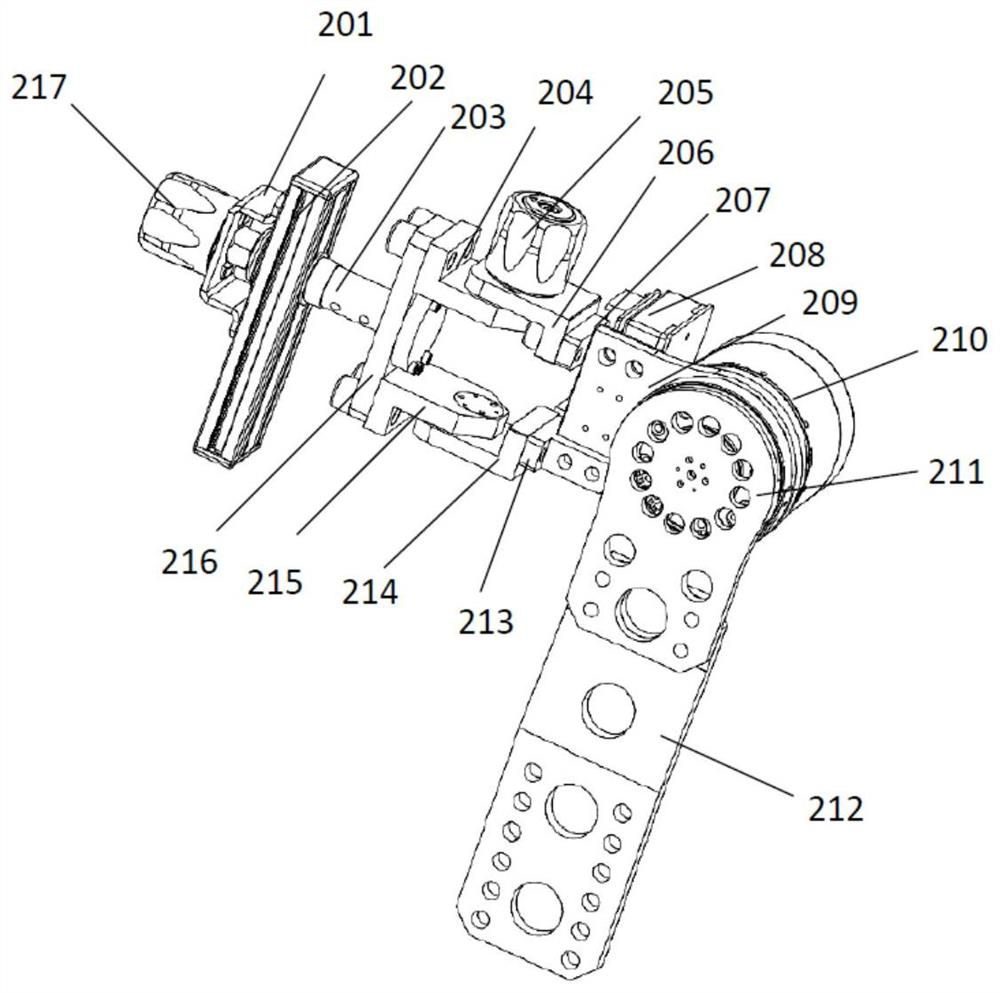
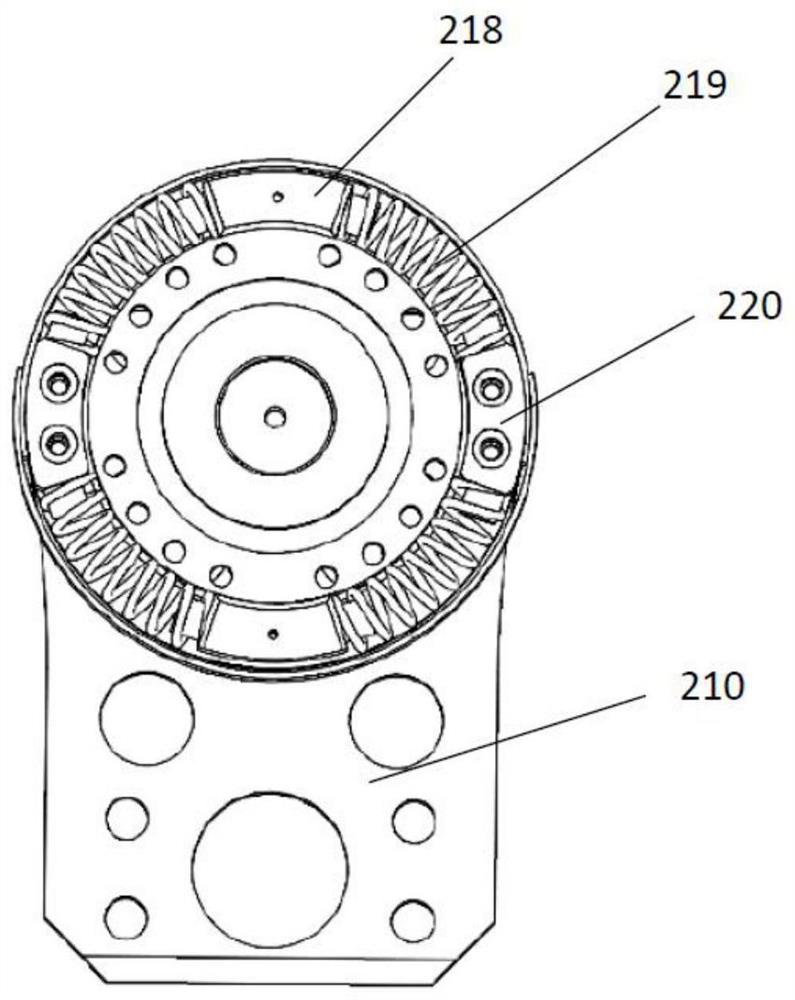
[0030] Such as figure 2 and 3 As shown, a lower extremity exoskeleton robot with variable stiffness, its hip joint 2 includes a locking knob sheet metal plate 201, a beam 202, a rotating shaft 203, an upper square hole rotating plate 204, an upper locking knob 205, an upper side Square hole connecting plate 206, upper square plate 207, motor drive plate 208, motor fixing plate 209, hip joint motor 210, end face output plate 211, hip joint distance adjustment plate 212, lower square plate 213, lower square hole connection Plate 214, lower square hole rotating plate 215, rotating plate connector 216, side locking knob 217, motor pressing block 218, spring 219, spring pressing block 220. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More