

Autonomous navigation control management system for large unmanned ship
A technology of autonomous navigation and control management, applied in the direction of control/regulation system, two-dimensional position/channel control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
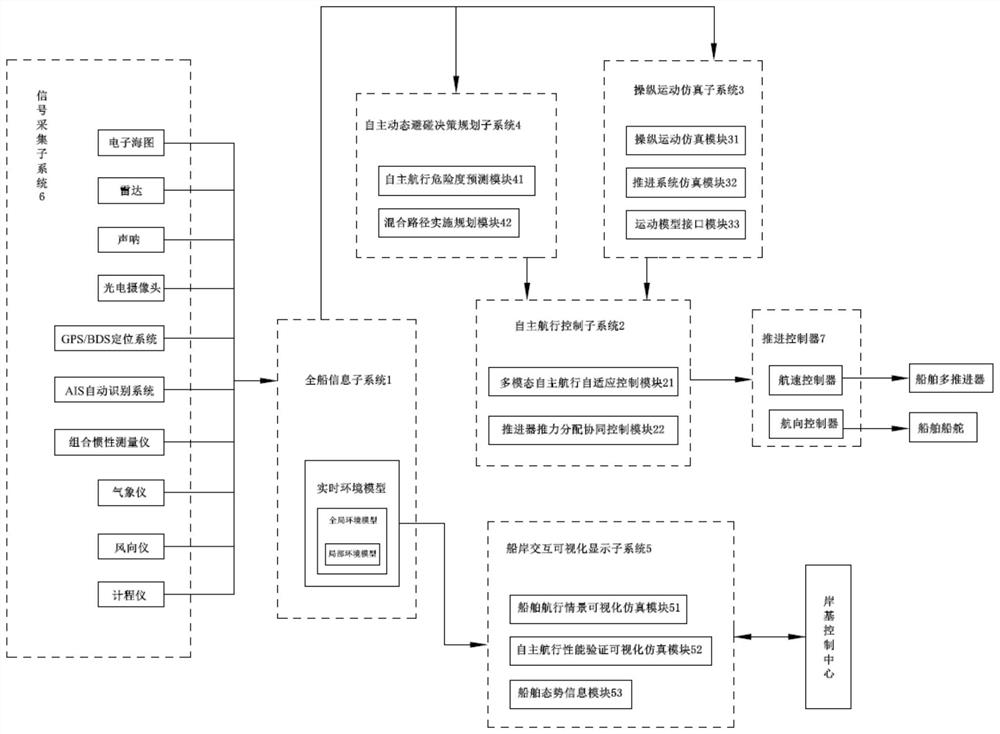
[0017] Embodiment 1: as figure 1As shown, the autonomous navigation control management system of this large unmanned boat includes the whole ship information subsystem 1, the autonomous navigation control subsystem 2, the maneuvering motion simulation subsystem 3, the autonomous dynamic collision avoidance decision-making planning subsystem 4, and the ship-shore interactive visual display Subsystem 5, signal acquisition subsystem 6 and propulsion controller 7; wherein, the whole ship information subsystem 1 is used to fuse, process and store the signal data detected and collected by the signal acquisition subsystem 6 during navigation, and The stored signal data is transmitted to the maneuvering motion simulation subsystem 3, the autonomous dynamic collision avoidance decision-making planning subsystem 4 and the ship-shore interactive visual display subsystem 5; the autonomous navigation control subsystem 2 includes a multi-mode autonomous navigation adaptive The control modul...
Embodiment 2
[0018] Embodiment 2: The multi-modal autonomous navigation adaptive control module 21 and propeller thrust distribution cooperative control module 22 in the autonomous navigation control subsystem 2 both adopt multi-modal nonlinear robust control algorithms. Specifically, the autonomous navigation control subsystem adopts a multi-modal nonlinear robust control algorithm, cooperates with a multi-modal autonomous navigation nonlinear robust controller, and gives the expected output of the controller to perform stable and accurate control of the ship's autonomous navigation. Tracking control: According to the expected output, the thrust distribution control of the multi-propeller of the ship is carried out to realize the rapid control of the ship's autonomous navigation. The maneuvering motion simulation module 31, the propulsion system simulation module 32, and the motion model interface module 33 in the maneuvering motion simulation subsystem 3 all use hybrid programming to esta...
Embodiment 3
[0019] Embodiment 3: The signal acquisition subsystem 6 includes electronic charts, radars, sonars, photoelectric cameras, GPS / BDS positioning systems, AIS automatic identification systems, meteorological instruments, wind direction instruments, speed logs, and combination inertial measurement instrument. Specifically, the electronic chart is used to provide the geographical environment information of the sea area, the radar, sonar, and photoelectric camera are used to obtain the environmental information of the sailing sea area and the relative position information of other ships in the past, and the GPS / BDS positioning system and the combined inertial measurement instrument It is used to obtain accurate position and course information of the unmanned ship, the AIS automatic identification system is used to provide the movement state information of other ships in the past and the ship type, scale, and draft information, and the weather instrument is used to predict the weather...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More